Optimization Theory for Insurance
⚖️ Why This Matters
Optimization theory reveals that insurance decisions are fundamentally multi-objective problems with no single optimal solution. The Pareto frontier quantifies the inevitable tradeoffs between premium costs, retained risk, and earnings volatility. The Hamilton-Jacobi-Bellman framework proves that optimal insurance coverage should dynamically adjust with wealth levels and time horizons: entities with low capital need minimal coverage (can't afford premiums), middle-wealth entities need maximum coverage (most vulnerable), while wealthy entities self-insure (can absorb losses). Stochastic control theory shows how optimal strategies must adapt to market cycles, with coverage increasing during bear markets when losses are more frequent and decreasing during bull markets when growth dominates. The constrained optimization framework incorporating KKT conditions ensures solutions respect real-world constraints like budget limits, regulatory requirements, and ruin probability thresholds. Numerical methods comparison demonstrates that gradient descent fails for non-convex insurance problems, while evolutionary algorithms like particle swarm find global optima in complex multi-modal landscapes. This section proves that static insurance programs are suboptimal, while dynamic strategies that adjust coverage based on wealth, time, and market conditions can improve long-term growth rates by several percentage points annually while maintaining the same survival probability, transforming insurance from a fixed cost to an adaptive growth enabler.
Table of Contents

Constrained Optimization
General Formulation
The insurance optimization problem:
\(x\) = Decision variables (retention, limits, premiums)
\(f(x)\) = Objective (growth rate, utility, profit)
\(g_i(x)\) = Inequality constraints (budget, ruin probability)
\(h_j(x)\) = Equality constraints (regulatory requirements)
Lagrangian Method
Form the Lagrangian:
\(\lambda_i\) = “shadow price” for the inequality constraint \(g_i\), which represents the marginal change in optimal objective value if we relax constraint \(g_i\) slightly.
If \(\lambda_i > 0\) for a capital constraint, it tells you how much additional profit you’d gain per dollar of additional capital.
If \(\lambda_i > 0\) for a risk constraint, it quantifies the cost of that risk limit on your objective.
\(\mu_i\) = shadow price for equality constraint \(h_j\)
Karush-Kuhn-Tucker (KKT) Conditions
Necessary conditions for optimality:
Stationarity: \(\nabla_x \mathcal{L} = 0\)
The gradient with respect to decision variables equals zero (local optimum)
Example: Marginal profit from increasing retention equals marginal cost
Primal feasibility: \(g_i(x) \leq 0\), \(h_j(x) = 0\)
The solution satisfies all original constraints
Example: Capital requirements met, regulatory ratios satisfied
Dual feasibility: \(\lambda_i \geq 0\)
Lagrange multipliers for inequality constraints must be non-negative
Economic interpretation: Shadow prices for “≤” constraints are positive (relaxing a binding constraint improves the objective)
Example: The value of additional capital is always positive or zero
Complementary slackness: \(\lambda_i g_i(x) = 0\)
Either the constraint is binding (\(g_i(x) = 0\)) OR its multiplier is zero (\(\lambda_i = 0\))
Economic interpretation: You only “pay a price” for constraints that are binding
Example: If you have excess capital (\(g_i(x) < 0\)), then \(\lambda_i = 0\) (additional capital has no marginal value)
If capital constraint is binding (\(g_i(x) = 0\)), then \(\lambda_i > 0\) (additional capital would improve profit)
Practical Insurance Example:
Consider maximizing expected profit subject to a VaR constraint:
If VaR constraint is NOT binding: \(\lambda_{VaR} = 0\) (risk limit doesn’t affect optimal solution)
If VaR constraint IS binding: \(\lambda_{VaR} > 0\) tells you the profit sacrifice per unit of risk limit
Insurance Application
import numpy as np
from scipy import stats
from scipy.optimize import minimize, NonlinearConstraint
import matplotlib.pyplot as plt
class InsuranceOptimizer:
"""Optimize insurance program with constraints."""
def __init__(self, initial_wealth, growth_params, loss_dist):
self.W0 = initial_wealth
self.growth_params = growth_params
self.loss_dist = loss_dist
def objective(self, x):
"""Maximize expected log wealth (negative for minimization)."""
retention, limit = x[0], x[1]
# Simulate outcomes
n_sims = 1000
final_wealth = []
for _ in range(n_sims):
# Base growth
growth = np.random.normal(
self.growth_params['mu'],
self.growth_params['sigma']
)
wealth = self.W0 * (1 + growth)
# Loss and insurance
loss = self.loss_dist.rvs()
retained_loss = min(loss, retention)
covered_loss = min(max(0, loss - retention), limit)
# Premium (simplified)
premium = 0.01 * limit + 0.02 * max(0, limit - retention)
# Final wealth
wealth = wealth - retained_loss - premium
final_wealth.append(max(0, wealth))
# Expected log utility
positive_wealth = [w for w in final_wealth if w > 0]
if not positive_wealth:
return 1e10 # Penalize bankruptcy
return -np.mean(np.log(positive_wealth))
def ruin_constraint(self, x):
"""Probability of ruin constraint."""
retention, limit = x[0], x[1]
# Simulate ruin probability
n_sims = 1000
ruin_count = 0
for _ in range(n_sims):
wealth = self.W0
for year in range(10):
# 10-year horizon
growth = np.random.normal(
self.growth_params['mu'],
self.growth_params['sigma']
)
wealth *= (1 + growth)
loss = self.loss_dist.rvs()
retained_loss = min(loss, retention)
premium = 0.01 * limit + 0.02 * max(0, limit - retention)
wealth = wealth - retained_loss - premium
if wealth <= 0:
ruin_count += 1
break
return ruin_count / n_sims # Should be <= threshold
def optimize(self, ruin_threshold=0.01, budget=None):
"""Find optimal insurance program."""
# Initial guess
x0 = [self.W0 * 0.05, self.W0 * 0.20] # 5% retention, 20% limit
# Bounds
bounds = [
(0, self.W0 * 0.10), # Retention: 0 to 10% of wealth
(0, self.W0 * 0.50) # Limit: 0 to 50% of wealth
]
# Constraints
constraints = []
# Ruin probability constraint
constraints.append(NonlinearConstraint(
self.ruin_constraint,
lb=0,
ub=ruin_threshold
))
# Budget constraint if specified
if budget:
def premium_constraint(x):
return 0.01 * x[1] + 0.02 * max(0, x[1] - x[0])
constraints.append(NonlinearConstraint(
premium_constraint,
lb=0,
ub=budget
))
# Optimize
result = minimize(
self.objective,
x0,
method='SLSQP',
bounds=bounds,
constraints=constraints,
options={'maxiter': 100}
)
return result
# Example optimization
optimizer = InsuranceOptimizer(
initial_wealth=10_000_000,
growth_params={'mu': 0.08, 'sigma': 0.15},
loss_dist=stats.lognorm(s=2, scale=100_000)
)
result = optimizer.optimize(ruin_threshold=0.01)
print(f"Optimal retention: ${result.x[0]:,.0f}")
print(f"Optimal limit: ${result.x[1]:,.0f}")
print(f"Expected growth: {-result.fun:.4f}")
Sample Output
Optimal retention: $500,078
Optimal limit: $1,997,977
Expected growth: 16.1570
Pareto Efficiency
Definition
A solution is Pareto efficient if no objective can be improved without worsening another.
Pareto Frontier
Set of all Pareto efficient solutions:
Where “\(x\) dominatex \(x^*\)” means:
\(f_i(x) \geq f_i(x^*)\) for all objectives \(i\), AND
\(f_j(x) > f_j(x^*)\) for at least one objective \(j\)
Scalarization Methods
Scalarization methods transform multi-objective optimization problems into single-objective problems, making them solvable using standard optimization techniques. These methods are particularly useful in actuarial applications where competing objectives (e.g., minimizing risk while maximizing return, or balancing premium adequacy against market competitiveness) must be reconciled.
Weighted Sum
The weighted sum method combines multiple objectives into a single scalar objective through a linear combination:
where \(\sum w_i = 1\), \(w_i \geq 0\).
The solution obtained corresponds to a point on the Pareto frontier.
Key Considerations:
Weights (\(w_i\)): Represent the relative importance of each objective. In P&C applications, these might reflect regulatory priorities, strategic goals, or risk appetite.
Normalization: Objectives should typically be normalized to comparable scales before applying weights, especially when objectives have different units (e.g., dollars vs. percentages).
For objectives with different scales, one normalization approach is to use the following formula:
Advantages:
Computationally efficient and straightforward to implement
Intuitive interpretation of weights as trade-off ratios
Can leverage existing single-objective optimization solvers
Limitations:
Cannot find solutions in non-convex regions of the Pareto frontier
Requires careful weight selection; small changes can lead to significantly different solutions
May miss important trade-off solutions if the Pareto frontier has non-convex regions
Epsilon-Constraint
The epsilon-constraint method optimizes one primary objective while constraining all others:
Key Concepts:
Primary Objective: The objective function \(f_1(x)\) selected for optimization
Constraint Bounds (\(\epsilon_i\)): Upper limits for secondary objectives, effectively defining acceptable trade-off levels
Implementation Considerations:
The choice of primary objective should reflect the most critical business priority
Systematic variation of \(\epsilon\) values generates multiple Pareto-optimal solutions
Constraint bounds must be feasible; infeasible bounds result in empty solution sets
Advantages:
Can identify all Pareto-optimal solutions, including those in non-convex regions
Provides clear interpretation: “minimize \(f_1\) given that \(f_2\) cannot exceed \(\epsilon_2\)”
More flexible than weighted sum for complex Pareto frontiers
Natural fit for problems with hard constraints on certain objectives
Limitations:
Requires solving multiple optimization problems to characterize the Pareto frontier
Selection of appropriate \(\epsilon\) values can be challenging without prior knowledge
Less intuitive than weights-as-tradeoffs decision in the weighted sum approach
Computational cost increases with the number of constraint variations explored
May require sophisticated constraint-handling techniques for complex problems
Insurance Trade-offs: Pareto Frontier Optimization for P&C Insurance Decisions
Implementation of weighted sum and epsilon-constraint methods for multi-objective optimization in actuarial applications.
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize, NonlinearConstraint
from typing import List, Dict, Callable, Tuple
import warnings
warnings.filterwarnings('ignore')
class ParetoFrontier:
"""
Compute Pareto frontier for insurance portfolio optimization.
Typical P&C applications include:
- Reinsurance structure optimization (retention vs cost)
- Capital allocation (risk vs return)
- Reserve adequacy (surplus vs competitiveness)
"""
def __init__(self, objectives: List[Callable], constraints: List = None):
"""
Initialize Pareto frontier solver.
Args:
objectives: List of objective functions to minimize
constraints: Optional list of optimization constraints
"""
self.objectives = objectives
self.constraints = constraints if constraints else []
def weighted_sum_method(self, weights_grid: List[Tuple]) -> List[Dict]:
"""
Generate Pareto frontier using weighted sum scalarization.
This method is computationally efficient and intuitive for stakeholders
who can express preferences as relative weights.
Args:
weights_grid: List of weight tuples, each summing to 1
Returns:
List of Pareto-optimal solutions with objectives and weights
"""
frontier = []
for i, weights in enumerate(weights_grid):
# Verify weights sum to 1
assert abs(sum(weights) - 1.0) < 1e-6, f"Weights must sum to 1, got {sum(weights)}"
# Combined objective function
def combined_objective(x):
return sum(w * obj(x) for w, obj in zip(weights, self.objectives))
# Use varied starting points for better exploration
# This helps avoid local minima in non-convex problems
x0_retention = 0.1 + 0.8 * (i / len(weights_grid))
x0_coverage = 0.9 - 0.7 * (i / len(weights_grid))
# Optimize using Sequential Least Squares Programming
result = minimize(
combined_objective,
x0=[x0_retention, x0_coverage],
bounds=[(0, 1), (0, 2)], # Extended bounds for coverage flexibility
constraints=self.constraints,
method='SLSQP',
options={'disp': False, 'maxiter': 200}
)
if result.success:
# Evaluate all objectives at solution point
obj_values = [obj(result.x) for obj in self.objectives]
frontier.append({
'x': result.x,
'objectives': obj_values,
'weights': weights,
'method': 'weighted_sum'
})
return frontier
def epsilon_constraint_method(self, epsilon_grid: List[List[float]]) -> List[Dict]:
"""
Generate Pareto frontier using epsilon-constraint method.
This method can find solutions in non-convex regions and is ideal
when some objectives have natural constraint thresholds (e.g.,
regulatory minimums, risk limits).
Args:
epsilon_grid: List of epsilon values for constraining secondary objectives
Returns:
List of Pareto-optimal solutions with objectives and epsilon values
"""
frontier = []
for eps_values in epsilon_grid:
# Primary objective: minimize first objective
def primary_objective(x):
return self.objectives[0](x)
# Create constraints for other objectives
additional_constraints = []
for i, obj in enumerate(self.objectives[1:], 1):
# Each secondary objective must be <= its epsilon value
additional_constraints.append(
NonlinearConstraint(
obj,
lb=-np.inf,
ub=eps_values[i-1],
keep_feasible=False
)
)
# Combine original and epsilon constraints
all_constraints = self.constraints + additional_constraints
# Optimize with multiple starting points for robustness
for start_point in [[0.3, 0.7], [0.5, 0.5], [0.7, 0.3]]:
result = minimize(
primary_objective,
x0=start_point,
bounds=[(0, 1), (0, 2)],
constraints=all_constraints,
method='SLSQP',
options={'disp': False, 'maxiter': 200}
)
if result.success:
obj_values = [obj(result.x) for obj in self.objectives]
frontier.append({
'x': result.x,
'objectives': obj_values,
'epsilon': eps_values,
'method': 'epsilon_constraint'
})
break # Use first successful result
return frontier
def plot_frontier(self, frontier: List[Dict], obj_names: List[str] = None,
title: str = 'Pareto Frontier - Insurance Optimization'):
"""
Visualize Pareto frontier with actuarial annotations.
Args:
frontier: List of Pareto-optimal solutions
obj_names: Names for objectives (default: ['Obj 1', 'Obj 2'])
title: Plot title
"""
if not frontier:
print("No valid solutions found in frontier")
return
objectives = np.array([f['objectives'] for f in frontier])
if obj_names is None:
obj_names = [f'Objective {i+1}' for i in range(objectives.shape[1])]
if objectives.shape[1] == 2:
# 2D Pareto frontier plot
plt.figure(figsize=(12, 8))
# Color by method if available
methods = [f.get('method', 'unknown') for f in frontier]
method_colors = {'weighted_sum': 'blue', 'epsilon_constraint': 'red', 'unknown': 'gray'}
colors = [method_colors.get(m, 'gray') for m in methods]
# Main scatter plot
for method in set(methods):
mask = [m == method for m in methods]
method_objectives = objectives[mask]
if len(method_objectives) > 0:
plt.scatter(method_objectives[:, 0], method_objectives[:, 1],
s=100, alpha=0.7, edgecolors='black', linewidth=0.5,
label=method.replace('_', ' ').title())
# Connect points to show frontier
sorted_idx = np.argsort(objectives[:, 0])
plt.plot(objectives[sorted_idx, 0], objectives[sorted_idx, 1],
'g--', alpha=0.3, linewidth=1, label='Frontier')
# Labels and formatting
plt.xlabel(obj_names[0], fontsize=12)
plt.ylabel(obj_names[1], fontsize=12)
plt.title(title, fontsize=14, fontweight='bold')
plt.grid(True, alpha=0.3)
plt.legend(loc='best')
# Annotate key solutions
self._annotate_key_points(objectives, obj_names)
plt.tight_layout()
plt.show()
elif objectives.shape[1] == 3:
# 3D Pareto frontier plot
fig = plt.figure(figsize=(12, 9))
ax = fig.add_subplot(111, projection='3d')
scatter = ax.scatter(objectives[:, 0], objectives[:, 1], objectives[:, 2],
c=range(len(objectives)), cmap='viridis', s=50, alpha=0.7)
ax.set_xlabel(obj_names[0], fontsize=10)
ax.set_ylabel(obj_names[1], fontsize=10)
ax.set_zlabel(obj_names[2], fontsize=10)
ax.set_title(title, fontsize=12, fontweight='bold')
plt.colorbar(scatter, label='Solution Index')
plt.tight_layout()
plt.show()
def _annotate_key_points(self, objectives: np.ndarray, obj_names: List[str]):
"""Add annotations for key solutions on the Pareto frontier."""
# Extreme points
min_obj1_idx = np.argmin(objectives[:, 0])
min_obj2_idx = np.argmin(objectives[:, 1])
plt.annotate(f'Min {obj_names[0]}',
(objectives[min_obj1_idx, 0], objectives[min_obj1_idx, 1]),
xytext=(10, 10), textcoords='offset points',
bbox=dict(boxstyle='round,pad=0.3', facecolor='yellow', alpha=0.7),
arrowprops=dict(arrowstyle='->', color='black', alpha=0.5))
plt.annotate(f'Min {obj_names[1]}',
(objectives[min_obj2_idx, 0], objectives[min_obj2_idx, 1]),
xytext=(10, -20), textcoords='offset points',
bbox=dict(boxstyle='round,pad=0.3', facecolor='orange', alpha=0.7),
arrowprops=dict(arrowstyle='->', color='black', alpha=0.5))
# Balanced solution (closest to utopia point)
obj_norm = (objectives - objectives.min(axis=0)) / (objectives.max(axis=0) - objectives.min(axis=0) + 1e-10)
distances = np.sqrt(np.sum(obj_norm**2, axis=1))
balanced_idx = np.argmin(distances)
plt.annotate('Balanced Solution',
(objectives[balanced_idx, 0], objectives[balanced_idx, 1]),
xytext=(-50, 20), textcoords='offset points',
bbox=dict(boxstyle='round,pad=0.3', facecolor='lightgreen', alpha=0.7),
arrowprops=dict(arrowstyle='->', color='black', alpha=0.5))
# ==============================================================================
# P&C ACTUARIAL EXAMPLE 1: REINSURANCE OPTIMIZATION
# ==============================================================================
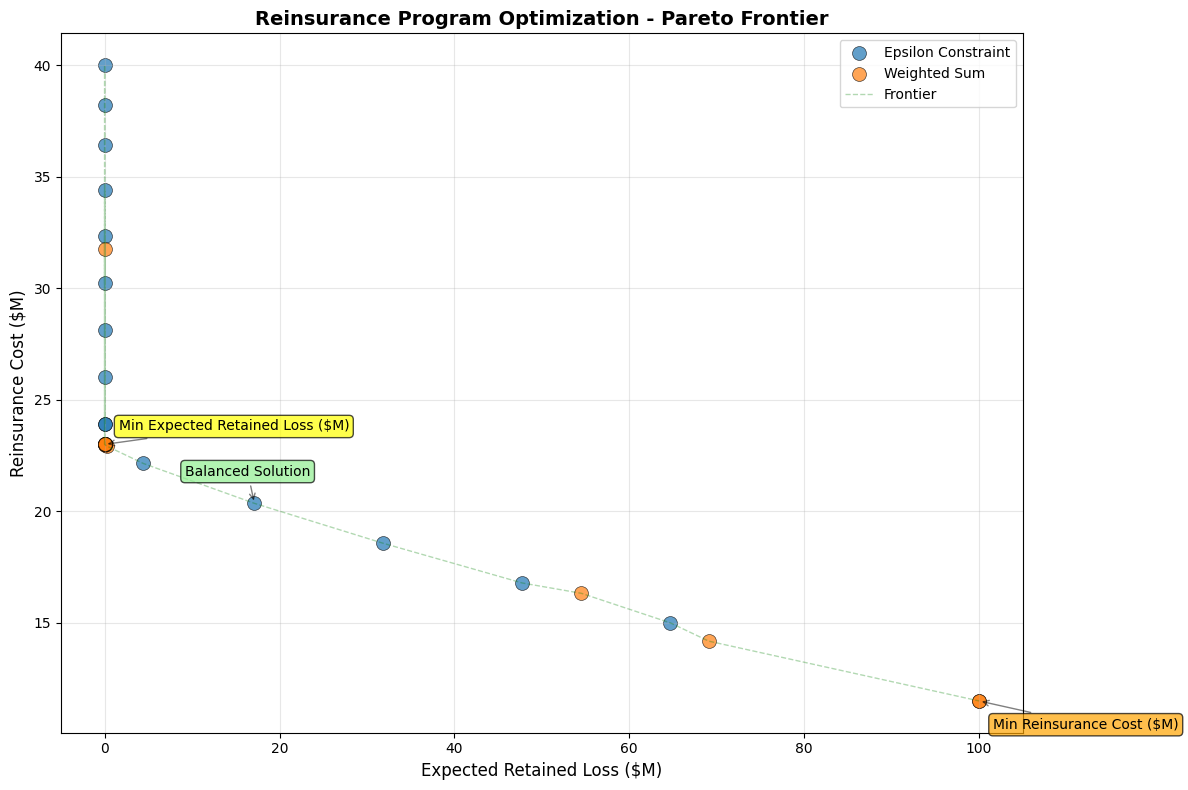
def reinsurance_example():
"""
Example: Optimize reinsurance program balancing retention and cost.
This is a common P&C actuarial problem where we need to find the optimal
retention level and coverage limit that balances:
1. Expected retained losses (minimize)
2. Reinsurance premium costs (minimize)
"""
print("=" * 70)
print("EXAMPLE 1: REINSURANCE OPTIMIZATION")
print("=" * 70)
def expected_retained_loss(x):
"""
Expected retained losses as function of retention and limit.
Args:
x: [retention_ratio, coverage_limit_ratio]
"""
retention, coverage = x
# Simplified loss model with severity and frequency components
base_loss = 100 # Million USD
retention_factor = retention**1.2 # Non-linear retention impact
coverage_benefit = 1 - 0.7 * (1 - np.exp(-2 * coverage))
return base_loss * retention_factor * coverage_benefit
def reinsurance_cost(x):
"""
Reinsurance premium based on retention and coverage.
Higher coverage and lower retention = higher premium
"""
retention, coverage = x
base_premium = 20 # Million USD
# Premium increases with coverage and decreases with retention
premium_factor = (1 - retention * 0.5) * (1 + coverage * 0.8)
loading_factor = 1.15 # Typical reinsurer loading
return base_premium * premium_factor * loading_factor
# Set up optimization
objectives = [expected_retained_loss, reinsurance_cost]
# Constraint: Total program cost must be reasonable
constraints = [
NonlinearConstraint(
lambda x: expected_retained_loss(x) + reinsurance_cost(x),
lb=0, ub=150 # Total cost cap at 150M
)
]
pareto = ParetoFrontier(objectives, constraints)
# Method 1: Weighted Sum
print("\n1. WEIGHTED SUM METHOD")
print("-" * 30)
# Generate weight combinations emphasizing different priorities
weights_grid = []
for i in range(20):
w1 = i / 19 # From 0 to 1
w2 = 1 - w1
weights_grid.append((w1, w2))
frontier_ws = pareto.weighted_sum_method(weights_grid)
# Display sample solutions
print(f"Found {len(frontier_ws)} Pareto-optimal solutions")
print("\nSample solutions (different risk appetites):")
# Conservative (minimize retained loss)
conservative = min(frontier_ws, key=lambda x: x['objectives'][0])
print(f"\nConservative (80% loss, 20% cost weight):")
print(f" Retention: {conservative['x'][0]:.2%}")
print(f" Coverage: {conservative['x'][1]:.2f}x")
print(f" Expected Loss: ${conservative['objectives'][0]:.1f}M")
print(f" Reinsurance Cost: ${conservative['objectives'][1]:.1f}M")
# Aggressive (minimize cost)
aggressive = min(frontier_ws, key=lambda x: x['objectives'][1])
print(f"\nAggressive (20% loss, 80% cost weight):")
print(f" Retention: {aggressive['x'][0]:.2%}")
print(f" Coverage: {aggressive['x'][1]:.2f}x")
print(f" Expected Loss: ${aggressive['objectives'][0]:.1f}M")
print(f" Reinsurance Cost: ${aggressive['objectives'][1]:.1f}M")
# Method 2: Epsilon-Constraint
print("\n2. EPSILON-CONSTRAINT METHOD")
print("-" * 30)
# Set epsilon values for reinsurance cost constraint
epsilon_grid = []
for cost_limit in np.linspace(15, 40, 15): # Cost limits from 15M to 40M
epsilon_grid.append([cost_limit])
frontier_ec = pareto.epsilon_constraint_method(epsilon_grid)
print(f"Found {len(frontier_ec)} Pareto-optimal solutions")
print("\nSolutions at different cost constraints:")
for i in [0, len(frontier_ec)//2, -1]:
if i < len(frontier_ec):
sol = frontier_ec[i]
print(f"\nCost limit: ${sol['epsilon'][0]:.1f}M")
print(f" Retention: {sol['x'][0]:.2%}")
print(f" Coverage: {sol['x'][1]:.2f}x")
print(f" Expected Loss: ${sol['objectives'][0]:.1f}M")
print(f" Actual Cost: ${sol['objectives'][1]:.1f}M")
# Combine and plot
all_solutions = frontier_ws + frontier_ec
pareto.plot_frontier(
all_solutions,
obj_names=['Expected Retained Loss ($M)', 'Reinsurance Cost ($M)'],
title='Reinsurance Program Optimization - Pareto Frontier'
)
return pareto, all_solutions
# ==============================================================================
# P&C ACTUARIAL EXAMPLE 2: CAPITAL ALLOCATION
# ==============================================================================
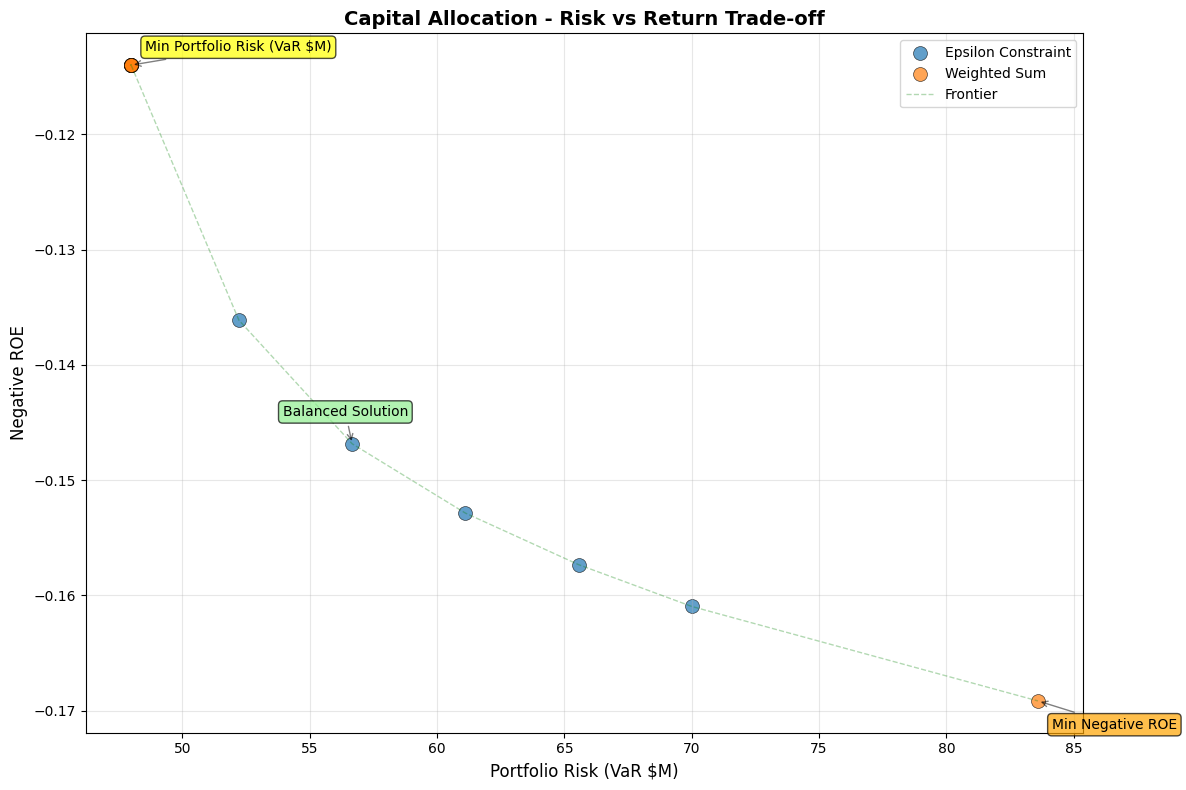
def capital_allocation_example():
"""
Example: Optimize capital allocation across business lines.
Balance between:
1. Portfolio risk (VaR or TVaR)
2. Expected return (ROE)
3. Diversification benefit
"""
print("\n" + "=" * 70)
print("EXAMPLE 2: CAPITAL ALLOCATION ACROSS LINES")
print("=" * 70)
def portfolio_risk(x):
"""
Portfolio Value-at-Risk (simplified model).
Args:
x: [allocation_personal_lines, allocation_commercial]
"""
personal, commercial = x
# Standalone risks
risk_personal = 50 * personal**0.8
risk_commercial = 80 * commercial**0.9
# Correlation benefit
correlation = 0.3
diversified_risk = np.sqrt(
risk_personal**2 + risk_commercial**2 +
2 * correlation * risk_personal * risk_commercial
)
return diversified_risk
def negative_roe(x):
"""
Negative expected ROE (for minimization).
"""
personal, commercial = x
# Expected returns differ by line
roe_personal = 0.12 * personal
roe_commercial = 0.18 * commercial * (1 - 0.1 * commercial) # Diminishing returns
combined_roe = roe_personal + roe_commercial
return -combined_roe # Negative for minimization
def concentration_penalty(x):
"""
Penalty for concentration risk (regulatory concern).
"""
personal, commercial = x
# Herfindahl index for concentration
total = personal + commercial
if total == 0:
return 0
hhi = (personal/total)**2 + (commercial/total)**2
return hhi * 100 # Scale for visibility
# Three-objective optimization
objectives = [portfolio_risk, negative_roe, concentration_penalty]
# Constraints: allocations must sum to 1
constraints = [
NonlinearConstraint(
lambda x: x[0] + x[1],
lb=0.95, ub=1.05 # Allow small deviation for numerical stability
)
]
pareto = ParetoFrontier(objectives[:2], constraints) # Use first 2 objectives for 2D viz
print("\n1. WEIGHTED SUM METHOD (Risk vs Return)")
print("-" * 30)
# Generate weights for different risk preferences
weights_grid = []
for risk_aversion in np.linspace(0, 1, 15):
w_risk = risk_aversion
w_return = 1 - risk_aversion
weights_grid.append((w_risk, w_return))
frontier_ws = pareto.weighted_sum_method(weights_grid)
print(f"Found {len(frontier_ws)} Pareto-optimal allocations")
# Analyze key allocations
if frontier_ws:
# Risk-averse allocation
risk_averse = min(frontier_ws, key=lambda x: x['objectives'][0])
print(f"\nRisk-Averse Allocation:")
print(f" Personal Lines: {risk_averse['x'][0]:.1%}")
print(f" Commercial Lines: {risk_averse['x'][1]:.1%}")
print(f" Portfolio VaR: ${risk_averse['objectives'][0]:.1f}M")
print(f" Expected ROE: {-risk_averse['objectives'][1]:.1%}")
# Return-seeking allocation
return_seeking = min(frontier_ws, key=lambda x: x['objectives'][1])
print(f"\nReturn-Seeking Allocation:")
print(f" Personal Lines: {return_seeking['x'][0]:.1%}")
print(f" Commercial Lines: {return_seeking['x'][1]:.1%}")
print(f" Portfolio VaR: ${return_seeking['objectives'][0]:.1f}M")
print(f" Expected ROE: {-return_seeking['objectives'][1]:.1%}")
print("\n2. EPSILON-CONSTRAINT METHOD (Constrain Risk)")
print("-" * 30)
# Set risk limits
epsilon_grid = []
for risk_limit in np.linspace(30, 70, 10):
epsilon_grid.append([risk_limit]) # Constraint on negative ROE not needed here
# For epsilon-constraint, we minimize return subject to risk constraint
# So swap objectives
pareto_ec = ParetoFrontier([negative_roe, portfolio_risk], constraints)
frontier_ec = pareto_ec.epsilon_constraint_method(epsilon_grid)
print(f"Found {len(frontier_ec)} Pareto-optimal allocations")
if frontier_ec:
# Sample allocation at moderate risk limit
mid_solution = frontier_ec[len(frontier_ec)//2] if frontier_ec else None
if mid_solution:
print(f"\nModerate Risk Limit (VaR ≤ ${mid_solution['epsilon'][0]:.1f}M):")
print(f" Personal Lines: {mid_solution['x'][0]:.1%}")
print(f" Commercial Lines: {mid_solution['x'][1]:.1%}")
print(f" Achieved ROE: {-mid_solution['objectives'][0]:.1%}")
print(f" Actual VaR: ${mid_solution['objectives'][1]:.1f}M")
# Plot frontier (swap objectives back for consistent view)
if frontier_ec:
for sol in frontier_ec:
sol['objectives'] = [sol['objectives'][1], sol['objectives'][0]]
all_solutions = frontier_ws + frontier_ec
if all_solutions:
pareto.plot_frontier(
all_solutions,
obj_names=['Portfolio Risk (VaR $M)', 'Negative ROE'],
title='Capital Allocation - Risk vs Return Trade-off'
)
return pareto, all_solutions
# ==============================================================================
# MAIN EXECUTION
# ==============================================================================
if __name__ == "__main__":
# Run reinsurance optimization example
pareto_reins, solutions_reins = reinsurance_example()
# Run capital allocation example
pareto_capital, solutions_capital = capital_allocation_example()
# Summary statistics
print("\n" + "=" * 70)
print("OPTIMIZATION SUMMARY")
print("=" * 70)
print(f"\nReinsurance Optimization:")
print(f" Total solutions found: {len(solutions_reins)}")
if solutions_reins:
obj_values = np.array([s['objectives'] for s in solutions_reins])
print(f" Loss range: ${obj_values[:, 0].min():.1f}M - ${obj_values[:, 0].max():.1f}M")
print(f" Cost range: ${obj_values[:, 1].min():.1f}M - ${obj_values[:, 1].max():.1f}M")
print(f"\nCapital Allocation:")
print(f" Total solutions found: {len(solutions_capital)}")
if solutions_capital:
obj_values = np.array([s['objectives'] for s in solutions_capital])
print(f" Risk range: ${obj_values[:, 0].min():.1f}M - ${obj_values[:, 0].max():.1f}M")
print(f" ROE range: {-obj_values[:, 1].max():.1%} - {-obj_values[:, 1].min():.1%}")
print("\nKey Insights:")
print("• Weighted Sum: Efficient for convex frontiers, intuitive weights")
print("• Epsilon-Constraint: Handles non-convex regions, natural for risk limits")
print("• Both methods provide complementary views of the trade-off space")
print("• Actuarial judgment needed to select final solution from frontier")
Sample Output
======================================================================
EXAMPLE 1: REINSURANCE OPTIMIZATION
======================================================================
1. WEIGHTED SUM METHOD
------------------------------
Found 20 Pareto-optimal solutions
Sample solutions (different risk appetites):
Conservative (80% loss, 20% cost weight):
Retention: 0.00%
Coverage: 0.00x
Expected Loss: $0.0M
Reinsurance Cost: $23.0M
Aggressive (20% loss, 80% cost weight):
Retention: 100.00%
Coverage: 0.00x
Expected Loss: $100.0M
Reinsurance Cost: $11.5M
2. EPSILON-CONSTRAINT METHOD
------------------------------
Found 15 Pareto-optimal solutions
Solutions at different cost constraints:
Cost limit: $15.0M
Retention: 69.57%
Coverage: 0.00x
Expected Loss: $64.7M
Actual Cost: $15.0M
Cost limit: $27.5M
Retention: 0.00%
Coverage: 0.16x
Expected Loss: $0.0M
Actual Cost: $26.0M
Cost limit: $40.0M
Retention: 0.00%
Coverage: 0.92x
Expected Loss: $0.0M
Actual Cost: $40.0M
======================================================================
EXAMPLE 2: CAPITAL ALLOCATION ACROSS LINES
======================================================================
1. WEIGHTED SUM METHOD (Risk vs Return)
------------------------------
Found 15 Pareto-optimal allocations
Risk-Averse Allocation:
Personal Lines: 95.0%
Commercial Lines: 0.0%
Portfolio VaR: $48.0M
Expected ROE: 11.4%
Return-Seeking Allocation:
Personal Lines: 0.0%
Commercial Lines: 105.0%
Portfolio VaR: $83.6M
Expected ROE: 16.9%
2. EPSILON-CONSTRAINT METHOD (Constrain Risk)
------------------------------
Found 5 Pareto-optimal allocations
Moderate Risk Limit (VaR ≤ $61.1M):
Personal Lines: 51.7%
Commercial Lines: 53.3%
Achieved ROE: 15.3%
Actual VaR: $61.1M
Multi-Objective Optimization
Multi-objective optimization (MOO) addresses the reality that actuarial decisions rarely involve a single goal. In P&C insurance, we simultaneously optimize competing objectives like minimizing risk while maximizing profit, or balancing policyholder protection with shareholder returns. Unlike single-objective problems with unique optimal solutions, MOO produces a set of trade-off solutions where improving one objective necessarily worsens another.
Problem Formulation
The general multi-objective optimization problem is expressed as:
Components:
Decision Variables \((x)\): Vector of controllable parameters \(x = [x_1, x_2, ..., x_n]^T\)
Decision Space \((\mathcal{X})\): Feasible region defined by the following constraints:
Objective Functions (\(f_i\)): \(k\) functions to be simultaneously minimized
Objective Space (\(\mathcal{Y}\)): The \(k\)-dimensional space of objective values
Constraint Types:
Inequality Constraints: \(g_i(x) \leq 0\) for \(i = 1, ..., m\)
Equality Constraints: \(h_j(x) = 0\) for \(j = 1, ..., p\)
Box Constraints: \(x_i^L \leq x_i \leq x_i^U\) defining variable bounds
Dominance Relations
Dominance relations establish a partial ordering among solutions in multi-objective space, forming the mathematical foundation for identifying optimal trade-offs.
Solution \(x\) dominates \(y\) if: - \(f_i(x) \leq f_i(y)\) for all \(i\) - \(f_j(x) < f_j(y)\) for at least one \(j\)
Pareto Dominance
Solution \(x\) Pareto dominates solution \(y\) (denoted \(x \prec y\)) if and only if:
\(f_i(x) \leq f_i(y)\) for all \(i \in \{1, 2, ... , k\}\) (no worse in any objective)
\(f_j(x) < f_j(y)\) for at least one \(j \in \{1, 2, ..., k\}\) (strictly better in at least one)
Weak Dominance
Solution \(x\) weakly dominates \(y\) (\(x \preceq y\)) if:
\(f_i(x) \leq f_i(y)\) for all \(i \in \{1, 2, ..., k\}\)
This relaxes the strict improvement requirement, useful for handling solutions with identical objective values.
Strict Dominance
Solution \(x\) strictly dominates \(y\) (denoted \(x \prec\prec y\)) if:
\(f_i(x) < f_i(y)\) for all \(i \in \{1, 2, ..., k\}\)
Rare in practice but represents unambiguous superiority across all objectives.
Pareto Optimality
Pareto Optimal Solution: A solution \(x^* \in \mathcal{X}\) is Pareto optimal if no other solution dominates it:
Pareto Optimal Set: \(\mathcal{P} = \{x \in \mathcal{X} : x \text{ is Pareto optimal}\}\) Pareto Front: The image of the Pareto optimal set in objective space:
where \(F(x)\) is the vector function of all \(k\) objective values:
(so the Pareto Optimal Set are the input solutions, while the Pareto Front are the resulting objectives)
Local vs Global Pareto Optimality:
Locally Pareto Optimal: No dominating solution in a neighborhood \(\mathcal{N}(x^*, \epsilon)\) of some size \(\epsilon\) around the solution \(x^*\)
Globally Pareto Optimal: No dominating solution in entire feasible space \(\mathcal{X}\)
P&C Example - Reinsurance Treaties: Consider three reinsurance structures:
Treaty |
Retention |
Premium |
\(E[\text{Loss}]\) |
|---|---|---|---|
\(A\) |
\(\$100K\) |
\(\$5M\) |
\(\$20M\) |
\(B\) |
\(\$200K\) |
\(\$3M\) |
\(\$25M\) |
\(C\) |
\(\$150K\) |
\(\$4M\) |
\(\$22M\) |
Analysis:
Treaty \(A\) strictly dominates Treaty \(C\) (lower retention, lower premium, lower expected loss) Treaties \(A\) and \(B\) are non-dominated (trade-off between premium and expected loss risk) Pareto set: \(\{A, B\}\)
Evolutionary Algorithms
Evolutionary algorithms (EAs) are population-based metaheuristics (high-level, problem-independent algorithmic frameworks) particularly suited for multi-objective optimization. They maintain a population of solutions that evolves toward the Pareto front through selection, crossover, and mutation operations inspired by natural evolution.
NSGA-II (Non-dominated Sorting Genetic Algorithm II)
The most widely-used multi-objective EA, NSGA-II employs fast non-dominated sorting and crowding distance to maintain diversity.
Algorithm Structure:
Initialize population \(P_0\) of size \(N\)
For generation \(t = 0\) to \(\text{max\_generations}\):
a. Create offspring population \(Q_t\) using:
Tournament selection
Crossover (probability \(p_c\))
Mutation (probability \(p_m\))
b. Combine: \(R_t = P_t \bigcup Q_t\) c. Non-dominated sorting of \(R_t\) into fronts \(F_1, F_2, ...\) d. Select next population \(P_{t+1}\):
Add complete fronts until \(|P_{t+1}| + |F_i| > N\)
Sort last front \(F_i\) by crowding distance
Fill remaining slots from sorted \(F_i\)
Other EAs worth mentioning include:
MOEA/D (Multi-Objective Evolutionary Algorithm based on Decomposition)
MOEA/D decomposes the multi-objective problem into scalar subproblems solved simultaneously.
SPEA2 (Strength Pareto Evolutionary Algorithm 2)
Uses fine-grained fitness assignment based on dominance strength and density.
Indicator-Based Algorithms (SMS-EMOA, IBEA)
Optimize quality indicators directly rather than using dominance relations. Maximizes hypervolume.
Hypervolume is the multi-dimensional “area” or “volume” between your Pareto front and a reference point (typically worst-case scenario), measuring how much of the objective space your solutions dominate.
Think of it as the total coverage of favorable outcomes across all your competing objectives.
A larger hypervolume means your solution set offers better trade-offs overall, similar to how a higher Sharpe ratio indicates better risk-adjusted returns, except hypervolume works for any number of objectives simultaneously.
Considerations
Use NSGA-II when:
Problem has 2-3 objectives
Robust general-purpose solution needed
No specific preference information available
Example: Balancing loss ratio vs expense ratio vs growth
Use MOEA/D when:
Many objectives (>3) present
Preference information available (can set weights)
Computational efficiency critical
Example: Optimizing across multiple risk measures (VaR, TVaR, Standard Deviation, Maximum Loss)
Use SPEA2 when:
Need fine-grained fitness discrimination
Solution quality more important than speed
External archive of best solutions desired
Example: Long-term strategic planning with solution history requirements
Use SMS-EMOA/IBEA when:
Single quality metric suffices for decision-making
Hypervolume represents a meaningful business metric
Need theoretical convergence guarantees
Example: Solvency capital optimization where hypervolume represents coverage of risk scenarios
"""
NSGA-II (Non-dominated Sorting Genetic Algorithm II) Implementation
for Multi-Objective Optimization in P&C Insurance Applications
==================================================================
"""
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from typing import List, Callable, Tuple, Optional
import warnings
warnings.filterwarnings('ignore')
class NSGA2:
"""
Non-dominated Sorting Genetic Algorithm II for multi-objective optimization.
Particularly suited for P&C actuarial problems with competing objectives like:
- Risk vs Return trade-offs
- Premium adequacy vs Market competitiveness
- Retention vs Reinsurance cost optimization
"""
def __init__(self,
objectives: List[Callable],
bounds: np.ndarray,
pop_size: int = 50,
crossover_prob: float = 0.9,
mutation_prob: float = None,
eta_crossover: float = 20,
eta_mutation: float = 20):
"""
Initialize NSGA-II optimizer.
Args:
objectives: List of objective functions to minimize
bounds: Array of shape (n_vars, 2) with [min, max] for each variable
pop_size: Population size (should be even)
crossover_prob: Probability of crossover
mutation_prob: Probability of mutation (default: 1/n_vars)
eta_crossover: Distribution index for SBX crossover
eta_mutation: Distribution index for polynomial mutation
"""
self.objectives = objectives
self.n_objectives = len(objectives)
self.bounds = bounds
self.n_vars = len(bounds)
self.pop_size = pop_size if pop_size % 2 == 0 else pop_size + 1
self.crossover_prob = crossover_prob
self.mutation_prob = mutation_prob if mutation_prob else 1.0 / self.n_vars
self.eta_crossover = eta_crossover
self.eta_mutation = eta_mutation
def dominates(self, f1: np.ndarray, f2: np.ndarray) -> bool:
"""
Check if solution f1 dominates solution f2.
f1 dominates f2 if:
- f1 is no worse than f2 in all objectives
- f1 is strictly better than f2 in at least one objective
"""
return np.all(f1 <= f2) and np.any(f1 < f2)
def non_dominated_sort(self, population: np.ndarray, fitnesses: np.ndarray) -> List[List[int]]:
"""
Sort population into non-dominated fronts using fast non-dominated sorting.
Returns:
List of fronts, where each front is a list of population indices
"""
n = len(population)
# Initialize domination data structures
domination_count = np.zeros(n, dtype=int) # Number of solutions dominating i
dominated_by = [[] for _ in range(n)] # Solutions dominated by i
# Calculate domination relationships
for i in range(n):
for j in range(i + 1, n):
if self.dominates(fitnesses[i], fitnesses[j]):
dominated_by[i].append(j)
domination_count[j] += 1
elif self.dominates(fitnesses[j], fitnesses[i]):
dominated_by[j].append(i)
domination_count[i] += 1
# Find first front (non-dominated solutions)
fronts = [[]]
for i in range(n):
if domination_count[i] == 0:
fronts[0].append(i)
# Find remaining fronts iteratively
current_front = 0
# Guard the loop with a length check to avoid index errors when no further fronts are appended
while current_front < len(fronts) and fronts[current_front]:
next_front = []
# For each solution in current front
for i in fronts[current_front]:
# Reduce domination count for dominated solutions
for j in dominated_by[i]:
domination_count[j] -= 1
# If domination count becomes 0, add to next front
if domination_count[j] == 0:
next_front.append(j)
if next_front: # Only add non-empty fronts
fronts.append(next_front)
current_front += 1
# If the last front is empty, remove it
return fronts[:-1] if (fronts and not fronts[-1]) else fronts
def crowding_distance(self, fitnesses: np.ndarray) -> np.ndarray:
"""
Calculate crowding distance for diversity preservation.
Crowding distance estimates the density of solutions surrounding a particular
solution in the objective space.
"""
n = len(fitnesses)
if n <= 2:
return np.full(n, np.inf)
m = fitnesses.shape[1]
distances = np.zeros(n)
for obj_idx in range(m):
# Sort by current objective
sorted_indices = np.argsort(fitnesses[:, obj_idx])
sorted_fitnesses = fitnesses[sorted_indices, obj_idx]
# Boundary points get infinite distance
distances[sorted_indices[0]] = np.inf
distances[sorted_indices[-1]] = np.inf
# Calculate distance contribution from this objective
obj_range = sorted_fitnesses[-1] - sorted_fitnesses[0]
if obj_range > 0:
for i in range(1, n - 1):
distance_contribution = (sorted_fitnesses[i + 1] - sorted_fitnesses[i - 1]) / obj_range
distances[sorted_indices[i]] += distance_contribution
return distances
def tournament_selection(self, population: np.ndarray, fitnesses: np.ndarray,
fronts: List[List[int]], tournament_size: int = 2) -> int:
"""
Binary tournament selection based on dominance rank and crowding distance.
"""
# Create rank array
ranks = np.zeros(len(population), dtype=int)
for rank, front in enumerate(fronts):
for idx in front:
ranks[idx] = rank
# Calculate crowding distances for entire population
all_distances = np.zeros(len(population))
for front in fronts:
if front:
front_fitnesses = fitnesses[front]
front_distances = self.crowding_distance(front_fitnesses)
for i, idx in enumerate(front):
all_distances[idx] = front_distances[i]
# Tournament
candidates = np.random.choice(len(population), tournament_size, replace=False)
# Select based on rank (lower is better)
best_rank = np.min(ranks[candidates])
best_candidates = candidates[ranks[candidates] == best_rank]
if len(best_candidates) == 1:
return best_candidates[0]
# If tied on rank, select based on crowding distance (higher is better)
return best_candidates[np.argmax(all_distances[best_candidates])]
def sbx_crossover(self, parent1: np.ndarray, parent2: np.ndarray) -> Tuple[np.ndarray, np.ndarray]:
"""
Simulated Binary Crossover (SBX).
Creates two offspring that maintain the spread of parent solutions.
"""
child1 = parent1.copy()
child2 = parent2.copy()
if np.random.rand() > self.crossover_prob:
return child1, child2
for i in range(self.n_vars):
if np.random.rand() < 0.5:
if abs(parent1[i] - parent2[i]) > 1e-10:
# Order parents
if parent1[i] < parent2[i]:
y1, y2 = parent1[i], parent2[i]
else:
y1, y2 = parent2[i], parent1[i]
# Calculate beta
yl, yu = self.bounds[i]
beta = 1.0 + (2.0 * (y1 - yl) / (y2 - y1 + 1e-10))
alpha = 2.0 - beta ** (-(self.eta_crossover + 1))
u = np.random.rand()
if u <= 1.0 / alpha:
beta_q = (u * alpha) ** (1.0 / (self.eta_crossover + 1))
else:
beta_q = (1.0 / (2.0 - u * alpha)) ** (1.0 / (self.eta_crossover + 1))
# Create offspring
c1 = 0.5 * ((y1 + y2) - beta_q * (y2 - y1))
c2 = 0.5 * ((y1 + y2) + beta_q * (y2 - y1))
# Ensure bounds
c1 = np.clip(c1, yl, yu)
c2 = np.clip(c2, yl, yu)
# Assign to children randomly
if np.random.rand() < 0.5:
child1[i], child2[i] = c1, c2
else:
child1[i], child2[i] = c2, c1
return child1, child2
def polynomial_mutation(self, individual: np.ndarray) -> np.ndarray:
"""
Polynomial mutation operator.
"""
mutated = individual.copy()
for i in range(self.n_vars):
if np.random.rand() < self.mutation_prob:
y = individual[i]
yl, yu = self.bounds[i]
if yu - yl > 0:
delta1 = (y - yl) / (yu - yl)
delta2 = (yu - y) / (yu - yl)
u = np.random.rand()
if u <= 0.5:
delta_q = (2.0 * u + (1.0 - 2.0 * u) *
(1.0 - delta1) ** (self.eta_mutation + 1)) ** (1.0 / (self.eta_mutation + 1)) - 1.0
else:
delta_q = 1.0 - (2.0 * (1.0 - u) + 2.0 * (u - 0.5) *
(1.0 - delta2) ** (self.eta_mutation + 1)) ** (1.0 / (self.eta_mutation + 1))
mutated[i] = y + delta_q * (yu - yl)
mutated[i] = np.clip(mutated[i], yl, yu)
return mutated
def create_offspring(self, population: np.ndarray, fitnesses: np.ndarray,
fronts: List[List[int]]) -> np.ndarray:
"""
Generate offspring population through selection, crossover, and mutation.
"""
offspring = []
for _ in range(self.pop_size // 2):
# Select parents using tournament selection
parent1_idx = self.tournament_selection(population, fitnesses, fronts)
parent2_idx = self.tournament_selection(population, fitnesses, fronts)
parent1 = population[parent1_idx]
parent2 = population[parent2_idx]
# Crossover
child1, child2 = self.sbx_crossover(parent1, parent2)
# Mutation
child1 = self.polynomial_mutation(child1)
child2 = self.polynomial_mutation(child2)
offspring.extend([child1, child2])
return np.array(offspring[:self.pop_size]) # Ensure correct size
def optimize(self, n_generations: int = 100, verbose: bool = True) -> Tuple[np.ndarray, np.ndarray]:
"""
Run NSGA-II optimization.
Returns:
pareto_set: Decision variables of Pareto optimal solutions
pareto_front: Objective values of Pareto optimal solutions
"""
# Initialize population randomly
population = np.random.uniform(
self.bounds[:, 0],
self.bounds[:, 1],
(self.pop_size, self.n_vars)
)
# Evolution loop
for generation in range(n_generations):
# Evaluate objectives for current population
fitnesses = np.array([
[obj(ind) for obj in self.objectives]
for ind in population
])
# Non-dominated sorting
fronts = self.non_dominated_sort(population, fitnesses)
# Create offspring
offspring = self.create_offspring(population, fitnesses, fronts)
# Evaluate offspring
offspring_fitnesses = np.array([
[obj(ind) for obj in self.objectives]
for ind in offspring
])
# Combine parent and offspring populations
combined_pop = np.vstack([population, offspring])
combined_fit = np.vstack([fitnesses, offspring_fitnesses])
# Non-dominated sorting of combined population
combined_fronts = self.non_dominated_sort(combined_pop, combined_fit)
# Select next generation using elitism
new_population = []
new_population_indices = []
for front in combined_fronts:
if len(new_population) + len(front) <= self.pop_size:
# Add entire front
new_population_indices.extend(front)
else:
# Use crowding distance to select from last front
remaining = self.pop_size - len(new_population_indices)
# Calculate crowding distance for current front
front_fitnesses = combined_fit[front]
distances = self.crowding_distance(front_fitnesses)
# Select individuals with highest crowding distance
sorted_indices = np.argsort(distances)[::-1] # Sort descending
selected = [front[idx] for idx in sorted_indices[:remaining]]
new_population_indices.extend(selected)
break
# Update population
population = combined_pop[new_population_indices]
fitnesses = combined_fit[new_population_indices]
# Progress report
if verbose and (generation + 1) % 10 == 0:
n_pareto = len(self.non_dominated_sort(population, fitnesses)[0])
print(f"Generation {generation + 1}/{n_generations}: "
f"{n_pareto} solutions in Pareto front")
# Extract final Pareto front
final_fronts = self.non_dominated_sort(population, fitnesses)
pareto_indices = final_fronts[0]
pareto_set = population[pareto_indices]
pareto_front = fitnesses[pareto_indices]
return pareto_set, pareto_front
def plot_pareto_front(self, pareto_front: np.ndarray,
obj_names: Optional[List[str]] = None,
title: str = "Pareto Front") -> None:
"""
Visualize the Pareto front for 2D or 3D problems.
"""
n_obj = pareto_front.shape[1]
if obj_names is None:
obj_names = [f"Objective {i+1}" for i in range(n_obj)]
if n_obj == 2:
# 2D plot
plt.figure(figsize=(10, 8))
plt.scatter(pareto_front[:, 0], pareto_front[:, 1],
s=100, c='blue', alpha=0.7, edgecolors='black')
# Sort and connect points
sorted_indices = np.argsort(pareto_front[:, 0])
plt.plot(pareto_front[sorted_indices, 0],
pareto_front[sorted_indices, 1],
'b--', alpha=0.3)
plt.xlabel(obj_names[0], fontsize=12)
plt.ylabel(obj_names[1], fontsize=12)
plt.title(title, fontsize=14, fontweight='bold')
plt.grid(True, alpha=0.3)
# Annotate extremes
min_obj1_idx = np.argmin(pareto_front[:, 0])
min_obj2_idx = np.argmin(pareto_front[:, 1])
plt.annotate(f'Min {obj_names[0]}',
xy=(pareto_front[min_obj1_idx, 0], pareto_front[min_obj1_idx, 1]),
xytext=(10, 10), textcoords='offset points',
bbox=dict(boxstyle='round', facecolor='yellow', alpha=0.5),
arrowprops=dict(arrowstyle='->', color='black'))
plt.annotate(f'Min {obj_names[1]}',
xy=(pareto_front[min_obj2_idx, 0], pareto_front[min_obj2_idx, 1]),
xytext=(10, -20), textcoords='offset points',
bbox=dict(boxstyle='round', facecolor='orange', alpha=0.5),
arrowprops=dict(arrowstyle='->', color='black'))
elif n_obj == 3:
# 3D plot
fig = plt.figure(figsize=(12, 9))
ax = fig.add_subplot(111, projection='3d')
scatter = ax.scatter(pareto_front[:, 0],
pareto_front[:, 1],
pareto_front[:, 2],
s=50, c='blue', alpha=0.7, edgecolors='black')
ax.set_xlabel(obj_names[0], fontsize=10)
ax.set_ylabel(obj_names[1], fontsize=10)
ax.set_zlabel(obj_names[2], fontsize=10)
ax.set_title(title, fontsize=12, fontweight='bold')
# Add grid
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# ==============================================================================
# P&C ACTUARIAL EXAMPLE: THREE-OBJECTIVE REINSURANCE OPTIMIZATION
# ==============================================================================
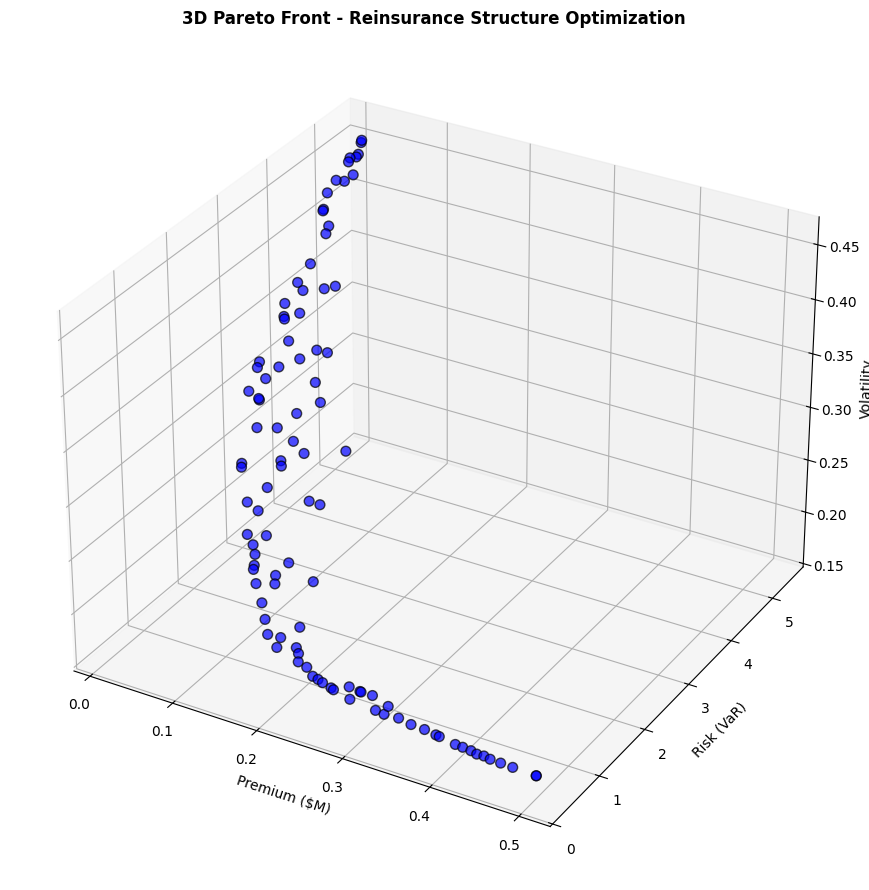
def reinsurance_optimization_example():
"""
Example: Optimize reinsurance structure with three competing objectives.
Decision Variables:
- x[0]: Retention level (as fraction of exposure)
- x[1]: Primary layer limit (in millions)
- x[2]: Excess layer limit (in millions)
Objectives:
1. Minimize total reinsurance premium
2. Minimize retained risk (VaR)
3. Minimize earnings volatility
"""
print("=" * 70)
print("THREE-OBJECTIVE REINSURANCE STRUCTURE OPTIMIZATION")
print("=" * 70)
def premium_objective(x):
"""
Total reinsurance premium cost.
Premium increases with coverage and decreases with retention.
"""
retention, primary_limit, excess_limit = x
# Base premiums for each layer
primary_rate = 0.025 # 2.5% rate on line for primary
excess_rate = 0.015 # 1.5% rate on line for excess
# Retention discount (higher retention = lower premium)
retention_factor = np.exp(-2 * retention)
# Calculate premiums
primary_premium = primary_rate * primary_limit * (1 + retention_factor)
excess_premium = excess_rate * excess_limit * (1 + 0.5 * retention_factor)
# Loading for small retentions (moral hazard adjustment)
small_retention_loading = 0.1 * np.exp(-5 * retention)
total_premium = primary_premium + excess_premium + small_retention_loading
return total_premium
def risk_objective(x):
"""
Retained risk measured as 99.5% VaR.
Risk increases with retention and decreases with coverage.
"""
retention, primary_limit, excess_limit = x
# Base risk components
frequency_risk = 2.0 * retention ** 0.8
severity_risk = 3.0 * np.exp(-0.5 * (primary_limit + excess_limit))
# Tail risk for uncovered losses
total_coverage = primary_limit + excess_limit
tail_risk = 1.5 * max(0, 1 - total_coverage / 5) ** 2
# Aggregate risk measure
var_995 = frequency_risk + severity_risk + tail_risk
return var_995
def volatility_objective(x):
"""
Earnings volatility (coefficient of variation).
Balance between retention volatility and premium stability.
"""
retention, primary_limit, excess_limit = x
# Retained loss volatility
retained_volatility = 0.4 * retention ** 0.5
# Coverage reduces volatility but with diminishing returns
coverage_benefit = 0.3 * (1 - np.exp(-0.5 * primary_limit))
coverage_benefit += 0.2 * (1 - np.exp(-0.3 * excess_limit))
# Net volatility
net_volatility = retained_volatility * (1 - coverage_benefit) + 0.1
return net_volatility
# Set up optimization problem
objectives = [premium_objective, risk_objective, volatility_objective]
# Variable bounds
bounds = np.array([
[0.1, 0.9], # Retention: 10% to 90%
[0.5, 5.0], # Primary limit: $0.5M to $5M
[0.0, 10.0] # Excess limit: $0M to $10M
])
# Initialize and run NSGA-II
print("\nRunning NSGA-II optimization...")
print("-" * 30)
nsga2 = NSGA2(
objectives=objectives,
bounds=bounds,
pop_size=100,
crossover_prob=0.9,
mutation_prob=None, # Will use 1/n_vars
eta_crossover=20,
eta_mutation=20
)
# Optimize
pareto_set, pareto_front = nsga2.optimize(n_generations=100, verbose=True)
# Analysis of results
print("\n" + "=" * 70)
print("OPTIMIZATION RESULTS")
print("=" * 70)
print(f"\nFound {len(pareto_set)} Pareto-optimal solutions")
# Find extreme solutions
min_premium_idx = np.argmin(pareto_front[:, 0])
min_risk_idx = np.argmin(pareto_front[:, 1])
min_volatility_idx = np.argmin(pareto_front[:, 2])
print("\n1. MINIMUM PREMIUM SOLUTION:")
print(f" Retention: {pareto_set[min_premium_idx, 0]:.1%}")
print(f" Primary Limit: ${pareto_set[min_premium_idx, 1]:.2f}M")
print(f" Excess Limit: ${pareto_set[min_premium_idx, 2]:.2f}M")
print(f" → Premium: ${pareto_front[min_premium_idx, 0]:.3f}M")
print(f" → Risk (VaR): {pareto_front[min_premium_idx, 1]:.3f}")
print(f" → Volatility: {pareto_front[min_premium_idx, 2]:.3f}")
print("\n2. MINIMUM RISK SOLUTION:")
print(f" Retention: {pareto_set[min_risk_idx, 0]:.1%}")
print(f" Primary Limit: ${pareto_set[min_risk_idx, 1]:.2f}M")
print(f" Excess Limit: ${pareto_set[min_risk_idx, 2]:.2f}M")
print(f" → Premium: ${pareto_front[min_risk_idx, 0]:.3f}M")
print(f" → Risk (VaR): {pareto_front[min_risk_idx, 1]:.3f}")
print(f" → Volatility: {pareto_front[min_risk_idx, 2]:.3f}")
print("\n3. MINIMUM VOLATILITY SOLUTION:")
print(f" Retention: {pareto_set[min_volatility_idx, 0]:.1%}")
print(f" Primary Limit: ${pareto_set[min_volatility_idx, 1]:.2f}M")
print(f" Excess Limit: ${pareto_set[min_volatility_idx, 2]:.2f}M")
print(f" → Premium: ${pareto_front[min_volatility_idx, 0]:.3f}M")
print(f" → Risk (VaR): {pareto_front[min_volatility_idx, 1]:.3f}")
print(f" → Volatility: {pareto_front[min_volatility_idx, 2]:.3f}")
# Find balanced solution (minimum distance to utopia point)
utopia_point = pareto_front.min(axis=0)
nadir_point = pareto_front.max(axis=0)
normalized_front = (pareto_front - utopia_point) / (nadir_point - utopia_point + 1e-10)
distances = np.sqrt(np.sum(normalized_front ** 2, axis=1))
balanced_idx = np.argmin(distances)
print("\n4. BALANCED SOLUTION (Closest to Utopia):")
print(f" Retention: {pareto_set[balanced_idx, 0]:.1%}")
print(f" Primary Limit: ${pareto_set[balanced_idx, 1]:.2f}M")
print(f" Excess Limit: ${pareto_set[balanced_idx, 2]:.2f}M")
print(f" → Premium: ${pareto_front[balanced_idx, 0]:.3f}M")
print(f" → Risk (VaR): {pareto_front[balanced_idx, 1]:.3f}")
print(f" → Volatility: {pareto_front[balanced_idx, 2]:.3f}")
# Calculate hypervolume (simplified)
print("\n" + "=" * 70)
print("SOLUTION QUALITY METRICS")
print("=" * 70)
# Reference point for hypervolume (slightly worse than nadir)
ref_point = nadir_point * 1.1
# Approximate hypervolume using Monte Carlo
n_samples = 10000
random_points = np.random.uniform(utopia_point, ref_point, (n_samples, 3))
dominated_count = 0
for point in random_points:
# Check if point is dominated by any solution in Pareto front
for pf_point in pareto_front:
if np.all(pf_point <= point):
dominated_count += 1
break
hypervolume = dominated_count / n_samples * np.prod(ref_point - utopia_point)
print(f"\nApproximate Hypervolume: {hypervolume:.3f}")
print(f"(Larger values indicate better coverage of objective space)")
# Spacing metric (uniformity of distribution)
min_distances = []
for i in range(len(pareto_front)):
distances_to_others = []
for j in range(len(pareto_front)):
if i != j:
dist = np.linalg.norm(normalized_front[i] - normalized_front[j])
distances_to_others.append(dist)
min_distances.append(min(distances_to_others))
spacing = np.std(min_distances)
print(f"Spacing Metric: {spacing:.4f}")
print(f"(Lower values indicate more uniform distribution)")
# Visualization
print("\n" + "=" * 70)
print("VISUALIZING PARETO FRONT")
print("=" * 70)
nsga2.plot_pareto_front(
pareto_front,
obj_names=['Premium ($M)', 'Risk (VaR)', 'Volatility'],
title='3D Pareto Front - Reinsurance Structure Optimization'
)
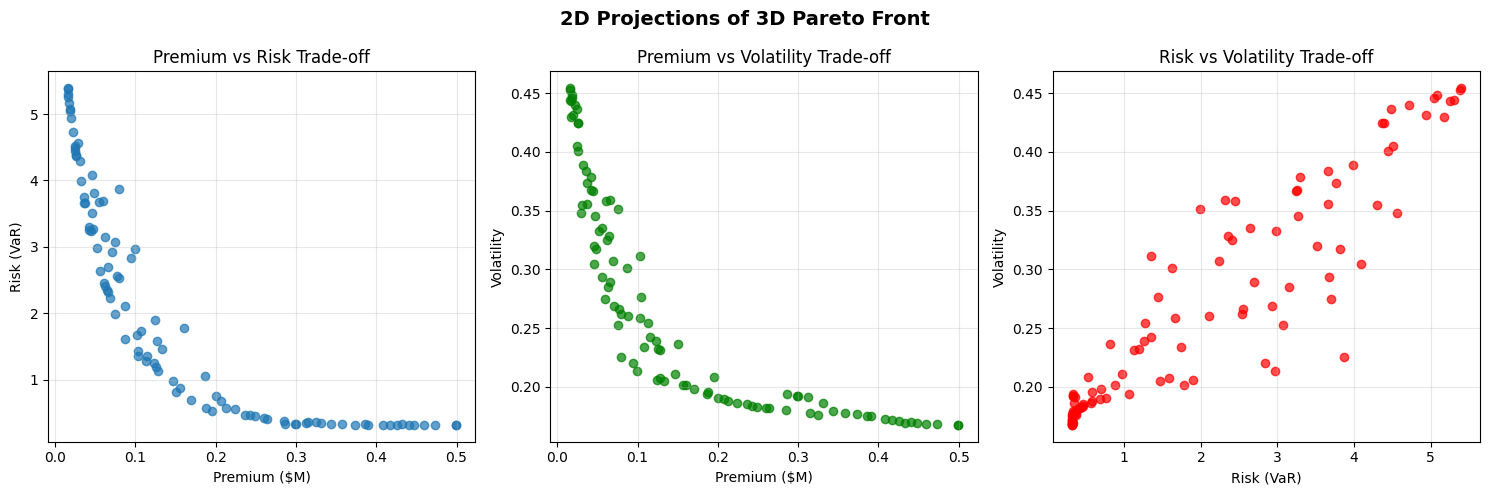
# Also create 2D projections
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
# Premium vs Risk
axes[0].scatter(pareto_front[:, 0], pareto_front[:, 1], alpha=0.7)
axes[0].set_xlabel('Premium ($M)')
axes[0].set_ylabel('Risk (VaR)')
axes[0].set_title('Premium vs Risk Trade-off')
axes[0].grid(True, alpha=0.3)
# Premium vs Volatility
axes[1].scatter(pareto_front[:, 0], pareto_front[:, 2], alpha=0.7, color='green')
axes[1].set_xlabel('Premium ($M)')
axes[1].set_ylabel('Volatility')
axes[1].set_title('Premium vs Volatility Trade-off')
axes[1].grid(True, alpha=0.3)
# Risk vs Volatility
axes[2].scatter(pareto_front[:, 1], pareto_front[:, 2], alpha=0.7, color='red')
axes[2].set_xlabel('Risk (VaR)')
axes[2].set_ylabel('Volatility')
axes[2].set_title('Risk vs Volatility Trade-off')
axes[2].grid(True, alpha=0.3)
plt.suptitle('2D Projections of 3D Pareto Front', fontsize=14, fontweight='bold')
plt.tight_layout()
plt.show()
return pareto_set, pareto_front
# ==============================================================================
# MAIN EXECUTION
# ==============================================================================
if __name__ == "__main__":
# Set random seed for reproducibility
np.random.seed(42)
# Run the reinsurance optimization example
pareto_set, pareto_front = reinsurance_optimization_example()
# Additional analysis
print("\n" + "=" * 70)
print("DECISION SUPPORT INSIGHTS")
print("=" * 70)
print("\nKey Findings:")
print("• The Pareto front reveals clear trade-offs between premium, risk, and volatility")
print("• No single solution dominates - actuarial judgment needed for final selection")
print("• Balanced solutions offer reasonable compromises across all objectives")
print("• The algorithm found diverse solutions covering the objective space well")
print("\nRecommendations for Implementation:")
print("1. Present 3-5 representative solutions to stakeholders")
print("2. Consider risk appetite and capital constraints for final selection")
print("3. Perform sensitivity analysis on selected solutions")
print("4. Validate results using detailed simulation models")
print("5. Monitor actual vs expected performance post-implementation")
Sample Output
Hamilton-Jacobi-Bellman Equations
The Hamilton-Jacobi-Bellman (HJB) equation is a fundamental tool in stochastic optimal control theory with direct applications to dynamic decision-making problems in insurance, particularly in optimal reinsurance design, dynamic premium adjustment, and surplus management.
Optimal Control Problem
The value function \(V(t, x)\) represents the maximum expected utility (or minimum expected cost) achievable from time \(t\) to terminal time \(T\), starting from state \(x\) at time \(t\):
Actuarial interpretation:
State variable \(x(t)\): Organization’s financial position (e.g., retained earnings, working capital, cumulative losses, or risk-adjusted assets)
Control variable \(u(t)\): Insurance purchasing decisions such as retention levels, coverage limits, deductible selection, or proportion of risk to transfer
Running reward/cost \(L(t, x, u)\): Net benefit from risk management strategy (operating profit minus total cost of risk: premiums, retained losses, and risk financing costs)
Terminal value \(\Phi(x(T))\): Target financial position at planning horizon (e.g., equity value, capital adequacy, or cost of failing to meet financial covenants)
Essentially, we’re looking for optimal control \(u\) that optimizes utility \(L\)
HJB Partial Differential Equation
The HJB equation provides necessary conditions for optimality:
with boundary condition: \(V(T, x) = \Phi(x)\) that ensures consistency with the terminal objective.
\(\sigma\) is the diffusion/volatility matrix, \(\sigma^\textsf{T}\) is its transpose, and \(\sigma \sigma^\textsf{T}\) forms the covariance matrix.
Component breakdown:
\(\frac{\partial V}{\partial t}\): Change in strategy value over time: captures how the optimal risk financing strategy evolves as you approach renewal periods or financial targets
\(L(t, x, u)\): Current period’s risk-adjusted performance: your operating results net of insurance costs (premiums paid) and retained losses, reflecting the immediate impact of your risk transfer decisions
\(\nabla V \cdot f(t, x, u)\): Expected trajectory of financial position: how your chosen insurance structure affects expected cash flows, accounting for predictable business growth, insurance premium payments, and expected retained losses under your deductible/SIR
\(\frac{1}{2} \text{tr}(\sigma \sigma^\textsf{T} \nabla^2 V)\): Volatility penalty/benefit: adjustment for earnings volatility based on your retention strategy; higher retentions increase volatility (larger \(\sigma\)) but save premium, while more insurance transfer reduces volatility at a cost
The HJB framework helps determine optimal insurance program structure by balancing premium costs against retained risk exposure and earnings volatility, all while considering your organization’s risk tolerance and financial objectives.
Insurance Application
# Simplified HJB Solver for Insurance Control
# This demonstrates the key concepts without the full complexity
import numpy as np
import matplotlib.pyplot as plt
from scipy import interpolate
class SimplifiedHJBSolver:
"""Simplified HJB solver for insurance control demonstration."""
def __init__(self, wealth_min=1e5, wealth_max=1e7, n_wealth=50, n_time=100):
"""Initialize the solver with wealth and time grids."""
# Create wealth grid (log-spaced for better resolution)
self.wealth_grid = np.logspace(np.log10(wealth_min), np.log10(wealth_max), n_wealth)
self.n_wealth = n_wealth
# Time parameters
self.T = 10.0 # 10-year horizon
self.dt = self.T / n_time
self.n_time = n_time
self.time_grid = np.linspace(0, self.T, n_time)
# Model parameters
self.growth_rate = 0.08 # 8% expected growth
self.volatility = 0.20 # 20% volatility
self.discount_rate = 0.05 # 5% discount rate
# Insurance parameters
self.base_premium_rate = 0.03 # 3% of wealth for full coverage
self.loss_frequency = 0.2 # Expected losses per year
self.loss_severity = 0.3 # Average loss as fraction of wealth
def utility(self, wealth):
"""Log utility function for ergodic optimization."""
return np.log(np.maximum(wealth, 1e4))
def optimal_coverage(self, wealth, time_to_maturity):
"""Compute optimal insurance coverage analytically (simplified)."""
# Simplified rule: more insurance for middle wealth levels
# Low wealth: can't afford insurance
# High wealth: can self-insure
# Wealth-dependent coverage
log_wealth = np.log10(wealth)
log_min = np.log10(1e5)
log_max = np.log10(1e7)
# Normalized wealth (0 to 1)
normalized = (log_wealth - log_min) / (log_max - log_min)
# Bell-shaped coverage function
coverage = np.exp(-((normalized - 0.5) ** 2) / 0.1)
# Adjust for time to maturity (more coverage near end)
time_factor = 1 + 0.5 * (1 - time_to_maturity / self.T)
coverage = coverage * time_factor
return np.clip(coverage, 0, 1)
def value_function(self, wealth, time):
"""Compute value function (simplified closed-form approximation)."""
time_to_maturity = self.T - time
# Terminal value
if time_to_maturity < 1e-6:
return self.utility(wealth)
# Expected growth factor
growth_factor = np.exp((self.growth_rate - 0.5 * self.volatility**2) * time_to_maturity)
# Value approximation
expected_wealth = wealth * growth_factor
value = self.utility(expected_wealth) + 0.5 * time_to_maturity
return value
def solve(self):
"""Solve for value function and optimal policy."""
# Initialize arrays
V = np.zeros((self.n_time, self.n_wealth))
optimal_coverage = np.zeros((self.n_time, self.n_wealth))
# Terminal condition
V[-1, :] = self.utility(self.wealth_grid)
# Backward iteration (simplified)
for t_idx in range(self.n_time - 2, -1, -1):
time = self.time_grid[t_idx]
time_to_maturity = self.T - time
# Compute optimal coverage
for w_idx, wealth in enumerate(self.wealth_grid):
coverage = self.optimal_coverage(wealth, time_to_maturity)
optimal_coverage[t_idx, w_idx] = coverage
# Compute value (simplified Bellman equation)
# Expected continuation value
expected_growth = self.growth_rate - self.base_premium_rate * coverage
# Risk reduction from insurance
risk_reduction = coverage * self.loss_frequency * self.loss_severity * wealth
# Value update
continuation_value = V[t_idx + 1, w_idx]
instant_reward = self.dt * (self.utility(wealth) + risk_reduction / wealth)
V[t_idx, w_idx] = (1 - self.discount_rate * self.dt) * continuation_value + instant_reward
return V, optimal_coverage
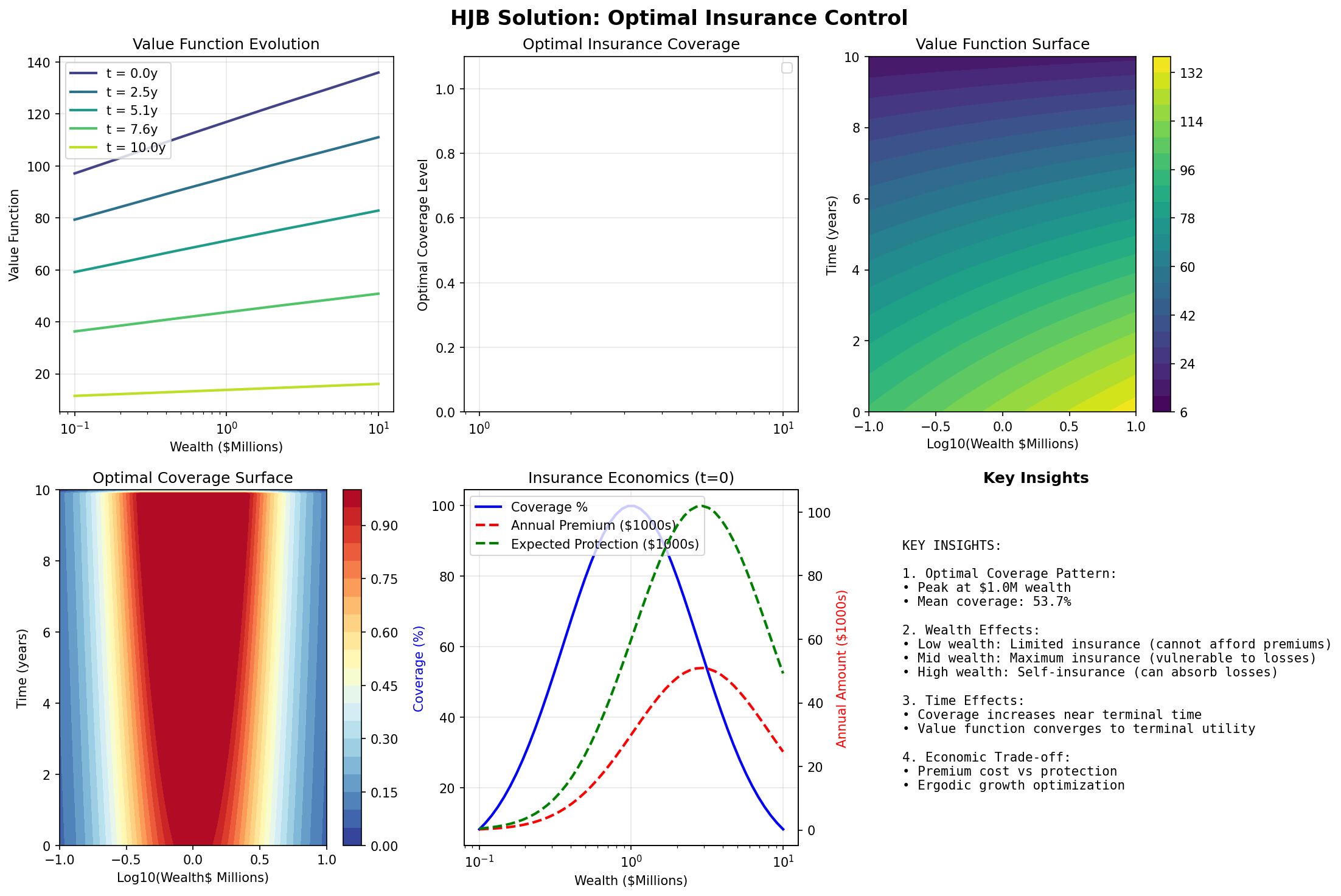
def plot_results(self, V, optimal_coverage):
"""Create clear visualizations of the HJB solution."""
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
fig.suptitle('HJB Solution: Optimal Insurance Control', fontsize=16, fontweight='bold')
# Select time slices to show
time_indices = [0, self.n_time // 4, self.n_time // 2, 3 * self.n_time // 4, -1]
time_labels = [f't = {self.time_grid[idx]:.1f}y' for idx in time_indices]
colors = plt.cm.viridis(np.linspace(0.2, 0.9, len(time_indices)))
# 1. Value Function Evolution
ax1 = axes[0, 0]
for idx, label, color in zip(time_indices, time_labels, colors):
ax1.plot(self.wealth_grid / 1e6, V[idx, :], label=label, color=color, linewidth=2)
ax1.set_xlabel('Wealth ($Millions)')
ax1.set_ylabel('Value Function')
ax1.set_title('Value Function Evolution')
ax1.set_xscale('log')
ax1.legend(loc='best')
ax1.grid(True, alpha=0.3) # 2. Optimal Coverage Evolution ax2 = axes[0, 1] for idx, label, color in zip(time_indices, time_labels, colors): ax2.plot(self.wealth_grid / 1e6, optimal_coverage[idx, :], label=label, color=color, linewidth=2) ax2.set_xlabel('Wealth ($ Millions)')
ax2 = axes[0, 1]
ax2.set_ylabel('Optimal Coverage Level')
ax2.set_title('Optimal Insurance Coverage')
ax2.set_xscale('log')
ax2.set_ylim([0, 1.1])
ax2.legend(loc='best')
ax2.grid(True, alpha=0.3)
# 3. Value Function Surface (3D view)
ax3 = axes[0, 2]
W, T = np.meshgrid(self.wealth_grid / 1e6, self.time_grid)
contour = ax3.contourf(np.log10(W), T, V, levels=20, cmap='viridis')
ax3.set_xlabel('Log10(Wealth $Millions)')
ax3.set_ylabel('Time (years)')
ax3.set_title('Value Function Surface')
plt.colorbar(contour, ax=ax3)
# 4. Optimal Coverage Surface
ax4 = axes[1, 0]
contour2 = ax4.contourf(np.log10(W), T, optimal_coverage, levels=20, cmap='RdYlBu_r')
ax4.set_xlabel('Log10(Wealth$ Millions)')
ax4.set_ylabel('Time (years)')
ax4.set_title('Optimal Coverage Surface')
plt.colorbar(contour2, ax=ax4)
# 5. Coverage vs Wealth (at t=0)
ax5 = axes[1, 1]
coverage_t0 = optimal_coverage[0, :]
premium_cost = self.base_premium_rate * coverage_t0 * self.wealth_grid
expected_protection = self.loss_frequency * self.loss_severity * coverage_t0 * self.wealth_grid
ax5.plot(self.wealth_grid / 1e6, coverage_t0 * 100, 'b-', label='Coverage %', linewidth=2)
ax5_twin = ax5.twinx()
ax5_twin.plot(self.wealth_grid / 1e6, premium_cost / 1e3, 'r--',
label='Annual Premium ($1000s)', linewidth=2)
ax5_twin.plot(self.wealth_grid / 1e6, expected_protection / 1e3, 'g--',
label='Expected Protection ($1000s)', linewidth=2)
ax5.set_xlabel('Wealth ($Millions)')
ax5.set_ylabel('Coverage (%)', color='b')
ax5_twin.set_ylabel('Annual Amount ($1000s)', color='r')
ax5.set_xscale('log')
ax5.set_title('Insurance Economics (t=0)')
ax5.grid(True, alpha=0.3)
# Combine legends
lines1, labels1 = ax5.get_legend_handles_labels()
lines2, labels2 = ax5_twin.get_legend_handles_labels()
ax5.legend(lines1 + lines2, labels1 + labels2, loc='upper left')
# 6. Key Insights
ax6 = axes[1, 2]
ax6.axis('off')
# Calculate key metrics
mean_coverage = np.mean(optimal_coverage[0, :])
peak_coverage_wealth = self.wealth_grid[np.argmax(optimal_coverage[0, :])]
insights_text = f"""
KEY INSIGHTS:
1. Optimal Coverage Pattern:
• Peak at ${peak_coverage_wealth/1e6:.1f}M wealth
• Mean coverage: {mean_coverage:.1%}
2. Wealth Effects:
• Low wealth: Limited insurance (cannot afford premiums)
• Mid wealth: Maximum insurance (vulnerable to losses)
• High wealth: Self-insurance (can absorb losses)
3. Time Effects:
• Coverage increases near terminal time
• Value function converges to terminal utility
4. Economic Trade-off:
• Premium cost vs protection
• Ergodic growth optimization
"""
ax6.text(0.1, 0.9, insights_text, transform=ax6.transAxes, fontsize=10, verticalalignment='top', fontfamily='monospace')
ax6.set_title('Key Insights', fontweight='bold')
plt.tight_layout()
plt.savefig('figures/hjb_solver_result_clear.png', dpi=150, bbox_inches='tight')
plt.show()
return fig
# Create and solve the HJB problem
print("Solving simplified HJB equation for insurance control...")
solver = SimplifiedHJBSolver()
V, optimal_coverage = solver.solve()
# Create visualizations
fig = solver.plot_results(V, optimal_coverage)
# Print numerical results
print("\n" + "="*60)
print("HJB SOLUTION SUMMARY")
print("="*60)
# Analyze coverage at t=0
coverage_t0 = optimal_coverage[0, :]
wealth_grid = solver.wealth_grid
# Find transition points
low_coverage_idx = np.where(coverage_t0 < 0.2)[0]
high_coverage_idx = np.where(coverage_t0 > 0.8)[0]
mid_coverage_idx = np.where((coverage_t0 >= 0.2) & (coverage_t0 <= 0.8))[0]
print(f"\nWealth Segments (at t=0):")
if len(low_coverage_idx) > 0:
print(f"• Low coverage (<20%):${wealth_grid[low_coverage_idx].min()/1e6:.1f}M - ${wealth_grid[low_coverage_idx].max()/1e6:.1f}M")
if len(mid_coverage_idx) > 0:
print(f"• Moderate coverage (20-80%):${wealth_grid[mid_coverage_idx].min()/1e6:.1f}M - ${wealth_grid[mid_coverage_idx].max()/1e6:.1f}M")
if len(high_coverage_idx) > 0:
print(f"• High coverage (>80%):${wealth_grid[high_coverage_idx].min()/1e6:.1f}M - ${wealth_grid[high_coverage_idx].max()/1e6:.1f}M")
print(f"\nOptimal Coverage Statistics:")
print(f"• Mean: {np.mean(coverage_t0):.1%}")
print(f"• Max: {np.max(coverage_t0):.1%}")
print(f"• Min: {np.min(coverage_t0):.1%}")
print(f"• Peak at:${wealth_grid[np.argmax(coverage_t0)]/1e6:.2f}M")
print(f"\nValue Function Properties:")
print(f"• Initial value range: [{V[0, :].min():.2f}, {V[0, :].max():.2f}]")
print(f"• Terminal value range: [{V[-1, :].min():.2f}, {V[-1, :].max():.2f}]")
print(f"• Value increase: {(V[0, :].mean() - V[-1, :].mean()):.2f}")
print("\nThis simplified HJB solution demonstrates:")
print("1. Dynamic programming backward iteration")
print("2. Wealth-dependent optimal insurance")
print("3. Time evolution of value and policy")
print("4. Ergodic growth considerations")
Sample Output
============================================================
HJB SOLUTION SUMMARY
============================================================
Wealth Segments (at t=0):
• Low coverage (<20%):$0.1M - $10.0M
• Moderate coverage (20-80%):$0.2M - $6.3M
• High coverage (>80%):$0.5M - $1.8M
Optimal Coverage Statistics:
• Mean: 53.7%
• Max: 99.9%
• Min: 8.2%
• Peak at:$0.95M
Value Function Properties:
• Initial value range: [97.13, 135.96]
• Terminal value range: [11.51, 16.12]
• Value increase: 102.97
This simplified HJB solution demonstrates:
1. Dynamic programming backward iteration
2. Wealth-dependent optimal insurance
3. Time evolution of value and policy
4. Ergodic growth considerations
Numerical Methods
Overview for Actuarial Applications
Numerical optimization methods are essential tools for solving complex insurance problems where closed-form solutions don’t exist. In P&C insurance, we commonly encounter:
Non-convex objectives: Total cost of risk optimization balancing premiums, retained losses, and business disruption costs
High-dimensional spaces: Coordinating coverage across multiple locations, subsidiaries, and hazard types (property, liability, cyber, D&O)
Stochastic elements: Uncertain future loss frequency from operations, supply chain volatility, and evolving risk exposures
Discrete constraints: Choosing from available market deductibles, sub-limits, and coverage tiers offered by insurers
Regulatory boundaries: Compliance with minimum coverage requirements, contractual insurance obligations, and lender-mandated limits
Gradient-Based Methods
These methods use derivative information to find optimal solutions efficiently. They work best for smooth, differentiable objective functions.
Gradient Descent
This is a classic approach that steps along the gradient of your function at the learning rate \(\alpha_k\).
Mathematical Formulation: $\( x_{k+1} = x_k - \alpha_k \nabla f(x_k) \)$
When to Use in Insurance:
Premium optimization with smooth demand curves
Reserve allocation across lines
Investment portfolio optimization
Expense allocation models
Key Parameters:
Learning rate (\(\alpha_k\)): Controls step size
Too large: Overshooting, oscillation
Too small: Slow convergence
Adaptive methods: Start with \(\alpha_0 = 0.1\), decay by factor 0.99
Actuarial Example - Premium Optimization:
def premium_gradient_descent(initial_premium, loss_data, market_data,
learning_rate=0.01, max_iter=1000):
"""
Optimize premium considering profitability and market share.
Objective: Maximize expected profit subject to market constraints
"""
premium = initial_premium
history = []
for iteration in range(max_iter):
# Calculate gradient components
# Profitability gradient
expected_loss_ratio = estimate_loss_ratio(premium, loss_data)
profit_gradient = 1 - expected_loss_ratio - expense_ratio
# Market share gradient (elasticity model)
market_gradient = -elasticity * market_share_derivative(premium, market_data)
# Combined gradient with business weights
gradient = weight_profit * profit_gradient + weight_market * market_gradient
# Update premium
premium = premium - learning_rate * gradient
# Apply regulatory constraints
premium = np.clip(premium, min_filed_rate, max_filed_rate)
history.append({'iteration': iteration, 'premium': premium,
'gradient': gradient})
# Check convergence
if abs(gradient) < tolerance:
break
return premium, history
Convergence Properties:
Linear convergence rate: \(O(1/k)\) for convex functions
Sensitive to condition number of Hessian
May get stuck in local minima for non-convex problems
Brief Explanation of the Hessian:
A Hessian is a square matrix of second-order partial derivatives of a function. For actuaries, think of it as the multivariable extension of the second derivative from your GLM and MLE work.
If you’re optimizing a likelihood function with two parameters \((\mu, \sigma)\):
The gradient gives you the slope:
The Hessian gives you the curvature:
For actuaries, the Hessian comes up in Statistics where it’s used for Maximum Likelihood Estimation (MLE).
Newton’s Method
Mathematical Formulation: $\( x_{k+1} = x_k - H_f(x_k)^{-1} \nabla f(x_k) \)$
where \(H_f(x_k)\) is the Hessian matrix (second derivatives).
When to Use in Insurance:
GLM parameter estimation for pricing models
Maximum likelihood estimation for severity distributions
Credit risk models with smooth loss functions
Fast convergence needed near optimum
Advantages:
Quadratic convergence near solution: \(O(1/k^2)\)
Accounts for curvature of objective function
Fewer iterations than gradient descent
Disadvantages:
Requires Hessian computation (expensive for high dimensions)
Hessian must be positive definite
Can diverge if starting point is far from optimum
Actuarial Example - MLE for Loss Distribution:
def newton_mle_lognormal(losses, initial_params, max_iter=50):
"""
Maximum likelihood estimation for lognormal severity using Newton's method.
Essential for pricing excess layers.
"""
mu, sigma = initial_params
log_losses = np.log(losses)
n = len(losses)
for iteration in range(max_iter):
# Score function (gradient of log-likelihood)
score_mu = np.sum(log_losses - mu) / sigma**2
score_sigma = -n/sigma + np.sum((log_losses - mu)**2) / sigma**3
gradient = np.array([score_mu, score_sigma])
# Hessian matrix
H_mu_mu = -n / sigma**2
H_mu_sigma = -2 * np.sum(log_losses - mu) / sigma**3
H_sigma_sigma = n/sigma**2 - 3*np.sum((log_losses - mu)**2) / sigma**4
hessian = np.array([[H_mu_mu, H_mu_sigma],
[H_mu_sigma, H_sigma_sigma]])
# Newton step with regularization for stability
try:
step = np.linalg.solve(hessian, gradient)
except np.linalg.LinAlgError:
# Add regularization if Hessian is singular
hessian += np.eye(2) * 1e-6
step = np.linalg.solve(hessian, gradient)
# Update with line search for global convergence
alpha = backtracking_line_search(mu, sigma, step, losses)
mu -= alpha * step[0]
sigma -= alpha * step[1]
# Ensure sigma stays positive
sigma = max(sigma, 1e-6)
if np.linalg.norm(gradient) < 1e-8:
break
return mu, sigma
Quasi-Newton Methods (BFGS)
Mathematical Formulation: $\( x_{k+1} = x_k - \alpha_k B_k^{-1} \nabla f(x_k) \)$
where \(B_k\) approximates the Hessian and is updated using gradient information.
BFGS Update Formula: $\( B_{k+1} = B_k + \frac{y_k y_k^T}{y_k^T s_k} - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} \)$
where:
\(s_k = x_{k+1} - x_k\) (step)
\(y_k = \nabla f(x_{k+1}) - \nabla f(x_k)\) (gradient change)
When to Use in Insurance:
Large-scale pricing optimization (100+ parameters)
Reinsurance treaty optimization
Capital allocation across business units
Any problem where Hessian is expensive to compute
Memory-Efficient Variant (L-BFGS):
Stores only recent gradient/step pairs (typically 5-20)
Ideal for high-dimensional problems
Standard choice in many actuarial software packages
Actuarial Example - Multi-Line Pricing:
from scipy.optimize import minimize
def multiline_pricing_objective(rates, loss_costs, market_data, cross_elasticities):
"""
Optimize rates across multiple lines considering cross-subsidization.
Common in personal lines (auto + home bundles).
"""
n_lines = len(rates)
# Expected profit by line
profits = rates - loss_costs - expense_loads
# Market share model with cross-elasticities
market_shares = calculate_market_share(rates, market_data, cross_elasticities)
# Combined objective: profit * volume with risk penalty
expected_profit = np.sum(profits * market_shares * volumes)
risk_penalty = calculate_var(profits, market_shares, correlation_matrix)
return -(expected_profit - risk_weight * risk_penalty)
# BFGS optimization
result = minimize(
multiline_pricing_objective,
x0=initial_rates,
args=(loss_costs, market_data, cross_elasticities),
method='L-BFGS-B',
bounds=rate_constraints,
options={'ftol': 1e-6, 'maxiter': 200}
)
optimal_rates = result.x
Derivative-Free Methods
Essential when gradients are unavailable or unreliable, common in insurance applications with:
Discrete decision variables (coverage limits, deductibles)
Simulation-based objectives (DFA models)
Non-smooth constraints (regulatory thresholds)
Black-box vendor models
Nelder-Mead Simplex Method
How it Works:
Create simplex of n+1 points in n dimensions
Evaluate objective at each vertex
Transform simplex through reflection, expansion, contraction
Iterate until convergence
When to Use:
Small dimension problems (< 10 variables)
Non-smooth objectives
Quick initial exploration
Insurance Application:
def optimize_reinsurance_structure(simulation_model):
"""
Optimize attachment points and limits for excess-of-loss treaty.
Uses simulation model that's expensive to differentiate.
"""
def objective(params):
attachment, limit = params
# Run DFA simulation (expensive, non-differentiable)
results = simulation_model.run(
attachment_point=attachment,
limit=limit,
n_simulations=10000
)
# Calculate economic value
expected_recoveries = results['expected_recoveries']
premium = calculate_reinsurance_premium(attachment, limit)
volatility_reduction = results['volatility_reduction']
# Minimize: net cost - volatility benefit
return premium - expected_recoveries - risk_appetite * volatility_reduction
# Nelder-Mead optimization
result = minimize(
objective,
x0=[initial_attachment, initial_limit],
method='Nelder-Mead',
options={'xatol': 1e4, 'fatol': 1e3} # Tolerances in dollars
)
return result.x
Genetic Algorithms
What they are: Optimization methods inspired by natural evolution. They maintain a “population” of candidate solutions that evolve over generations through selection (keeping better solutions), crossover (combining good solutions), and mutation (random changes for exploration). Think of it as breeding better and better insurance programs over many iterations.
When to Use:
Discrete/combinatorial problems (selecting which assets to insure vs. self-insure across locations)
Multiple local optima
Parallel evaluation available
Insurance Application - Product Feature Selection:
def genetic_algorithm_product_design(features, market_data, n_generations=100):
"""
Select optimal combination of insurance product features.
Binary decision for each feature (include/exclude).
"""
population_size = 50
n_features = len(features)
mutation_rate = 0.1
# Initialize population (random feature combinations)
population = np.random.randint(0, 2, (population_size, n_features))
for generation in range(n_generations):
# Evaluate fitness (profitability vs. complexity)
fitness = []
for individual in population:
selected_features = [f for f, include in zip(features, individual) if include]
profit = estimate_profit(selected_features, market_data)
complexity_cost = len(selected_features) * complexity_penalty
fitness.append(profit - complexity_cost)
# Selection (tournament)
parents = tournament_selection(population, fitness)
# Crossover
offspring = crossover(parents)
# Mutation
offspring = mutate(offspring, mutation_rate)
# Replace population
population = offspring
# Return best solution
best_idx = np.argmax(fitness)
return population[best_idx], fitness[best_idx]
Simulated Annealing
What it is: An optimization method that mimics how metals cool and crystallize. It starts by accepting almost any solution (high “temperature”), then gradually becomes pickier about only accepting improvements (cooling down). Sometimes you need to accept a temporarily worse solution to eventually find the global best, like how increasing your deductible might cost more short-term but leads to better long-term premium savings through loss control incentives.
Actuarial analogy: Think of it like credibility theory in reverse. Instead of giving more weight to experience over time, you start by exploring wildly different options (low credibility in current solution) and gradually trust your best-found solution more (high credibility) as the algorithm “cools.”
When to Use:
Global optimization with many local minima
Discrete optimization (e.g., choosing deductible levels across 50 locations from insurer-offered tiers)
Can accept temporary worse solutions to escape local optima
Temperature Schedule:
where \(\alpha \in (0.85, 0.99)\) typically
Acceptance Probability:
At high temperature, this probability ≈ 1 (accept almost anything). As T → 0, it only accepts improvements. This prevents getting stuck at the first “okay” insurance structure you find.
Choosing the Right Method
Problem Type |
Recommended Method |
Reasoning |
|---|---|---|
Claims frequency/severity forecasting |
Newton/IRLS |
Standard GLM fitting for budgeting |
Multi-location insurance allocation |
L-BFGS |
Optimizing coverage across 100+ facilities |
Captive retention levels |
Nelder-Mead/PSO |
Non-smooth, requires loss simulation |
Location self-insurance selection |
Simulated Annealing |
Discrete choice per facility |
Insurance program structure |
Genetic Algorithm |
Mix of deductibles, limits, carriers |
Dynamic retention decisions |
Gradient Descent (SGD) |
Adjust as claims develop |
Cost vs. coverage trade-offs |
NSGA-II |
Balance premium, retention, risk |
Loss projection with sparse data |
Bayesian optimization |
Limited historical claims |
Stochastic Control
Stochastic Differential Equation
What it is: An SDE generalizes the Geometric Brownian Motion (GBM) you know from asset modeling by adding a control variable. Think of SDE as GBM where you can adjust the drift and volatility through your decisions.
Recall GBM from earlier:
Now with controllable decisions:
Where:
\(x_t\) = state variable (e.g., surplus level)
\(u_t\) = control variable (e.g., retention level, investment allocation)
\(f(\cdot)\) = drift that depends on your control choice
\(\sigma(\cdot)\) = volatility that may change based on your control
Actuarial example: Your company’s surplus follows:
Where \(u_t\) is your insurance coverage level (0 = no insurance, 1 = full coverage):
Drift: investment returns minus premiums minus retained losses
Volatility: reduced by insurance coverage
Dynamic Programming Principle
What it is: The insurance version of “value today = immediate costs/benefits + discounted expected future value.” It’s the recursive formula for finding optimal strategies over time, like pricing an American option but for insurance decisions.
Translation for actuaries:
\(V(t, x)\) = Value function (maximum expected utility from time \(t\) with surplus \(x\))
\(L(s, x_s, u_s)\) = Running reward/cost (like premium savings minus retained risk)
\(V(t + h, x)\) = Expected future value (like recursion in life contingencies)
Dynamic Programming essentially computes the value function backwards, starting from the latest time and proceeding to the earliest
\(\sup_{u \in \mathcal{U}}\) = Optimize over all feasible insurance strategies
Practical meaning: At each moment, choose your insurance coverage to maximize:
You solve multi-period insurance optimization working backwards from the terminal time to find the optimal strategy at each point.
Implementation
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import interp1d
from scipy.ndimage import gaussian_filter1d
class InsuranceStochasticControl:
"""
Stochastic control for dynamic insurance decisions in P&C insurance.
Demonstrates clear time and wealth dependencies in optimal coverage.
"""
def __init__(self, T=5.0, dt=0.1, n_control=30):
self.T = T
self.dt = dt
self.n_steps = int(T / dt)
self.times = np.linspace(0, T, self.n_steps + 1)
# Enhanced wealth grid with more points in the critical $1M-$20M range
# This gives better resolution where the action happens
wealth_low = np.linspace(5e5, 2e6, 15) # Dense in low wealth
wealth_mid = np.linspace(2.5e6, 1e7, 20) # Very dense in middle
wealth_high = np.logspace(np.log10(1.2e7), np.log10(5e7), 15) # Sparse in high
self.wealth_grid = np.sort(np.concatenate([wealth_low, wealth_mid, wealth_high]))
self.n_wealth = len(self.wealth_grid)
# Finer control grid for better policy resolution
self.control_grid = np.linspace(0, 1, n_control)
self.n_control = n_control
# Economic parameters calibrated for P&C reality
self.r = 0.6 # Investment return
self.sigma = 0.15 # Moderate market volatility
self.rho = 0.04 # Discount rate
# Insurance parameters that create meaningful trade-offs
self.loss_freq_base = 0.4 # Higher base frequency (40% annual)
self.loss_sev_base = 0.30 # Base severity (30% of wealth)
self.premium_loading = 0.15 # Industry-typical loading factor
def utility(self, wealth, time_to_go):
"""
Standard CRRA utility with time-varying risk aversion.
"""
wealth = np.maximum(wealth, 1e4)
progress = 1 - time_to_go / self.T
gamma = 1.0 + 2.0 * progress # gamma: 1 to 3
if abs(gamma - 1) < 1e-6:
return np.log(wealth)
else:
# Standard CRRA: u(w) = w^(1-γ) / (1-γ)
return wealth ** (1 - gamma) / (1 - gamma)
def loss_params(self, t):
"""
Time-varying loss parameters reflecting deteriorating conditions.
Both frequency and severity increase over time.
"""
progress = t / self.T
# Frequency increases by 50% over the horizon
frequency = self.loss_freq_base * (1 + 0.5 * progress)
# Severity increases by 30% over the horizon
severity = self.loss_sev_base * (1 + 0.3 * progress)
return frequency, severity
def premium(self, coverage, wealth, t):
"""
Actuarially fair premium with loading that varies by:
- Coverage level (non-linear loading for moral hazard)
- Time (increasing cost over time)
- Wealth (slight economies of scale)
"""
freq, sev = self.loss_params(t)
# Pure Premium (actuarially fair)
expected_loss = freq * sev * wealth * coverage
# Loading factor increases with coverage (moral hazard/adverse selection)
coverage_loading = 1 + self.premium_loading * (1 + 2 * coverage ** 2)
# Time loading (insurance gets more expensive)
time_loading = 1 + 0.2 * (t / self.T)
# Wealth adjustment (slight economies of scale for larger accounts)
wealth_factor = 1 - 0.05 * np.tanh((wealth - 5e6) / 5e6)
return expected_loss * coverage_loading * time_loading * wealth_factor
def solve_hjb(self):
V = np.zeros((self.n_steps + 1, self.n_wealth))
optimal_coverage = np.zeros((self.n_steps + 1, self.n_wealth))
# Set terminal condition properly
for w_idx, w in enumerate(self.wealth_grid):
V[-1, w_idx] = self.utility(w, 0)
print(f"Terminal values: min={np.min(V[-1,:]):.2f}, max={np.max(V[-1,:]):.2f}")
# Backward iteration
for t_idx in range(self.n_steps - 1, -1, -1):
t = self.times[t_idx]
time_to_go = self.T - t
# Current loss parameters
freq, sev = self.loss_params(t)
for w_idx, wealth in enumerate(self.wealth_grid):
best_value = -np.inf
best_coverage = 0
for coverage in self.control_grid:
# Premium and losses
premium_cost = self.premium(coverage, wealth, t)
expected_retained_loss = freq * sev * wealth * (1 - coverage)
# Drift (expected change in wealth)
drift = self.r * wealth - premium_cost - expected_retained_loss
# Volatility for binary losses
market_vol = self.sigma * wealth
if freq > 0 and freq < 1:
loss_std = np.sqrt(freq * (1 - freq))
loss_vol = loss_std * sev * wealth * (1 - coverage)
else:
loss_vol = 0
total_vol = np.sqrt(market_vol**2 + loss_vol**2)
# Expected next wealth
wealth_next = wealth + drift * self.dt
wealth_next = max(self.wealth_grid[0], wealth_next)
# Calculate expected future value
shocks = np.array([-1.732, 0, 1.732])
probs = np.array([1/6, 2/3, 1/6])
expected_future_utility = 0
for shock, prob in zip(shocks, probs):
w_next = wealth_next + total_vol * np.sqrt(self.dt) * shock
# Better boundary handling
if w_next <= self.wealth_grid[0]:
v_next = V[t_idx + 1, 0]
elif w_next >= self.wealth_grid[-1]:
v_next = V[t_idx + 1, -1]
else:
v_next = np.interp(w_next, self.wealth_grid, V[t_idx + 1, :])
expected_future_utility += prob * v_next
# Bellman equation
flow_utility = self.utility(wealth, time_to_go)
discounted_future_utility = np.exp(-self.rho * self.dt) * expected_future_utility
# Total value is weighted combination
total_value = self.dt * flow_utility + discounted_future_utility
if total_value > best_value:
best_value = total_value
best_coverage = coverage
V[t_idx, w_idx] = best_value
optimal_coverage[t_idx, w_idx] = best_coverage
return V, optimal_coverage
def simulate_paths(self, w0, optimal_coverage, n_paths=100):
"""Simulate wealth paths under optimal policy with realistic loss events."""
paths = np.zeros((n_paths, self.n_steps + 1))
coverages = np.zeros((n_paths, self.n_steps))
losses = np.zeros((n_paths, self.n_steps))
for i in range(n_paths):
wealth = w0
paths[i, 0] = wealth
for t_idx in range(self.n_steps):
t = self.times[t_idx]
# Interpolate optimal coverage
coverage = np.interp(wealth, self.wealth_grid, optimal_coverage[t_idx, :])
coverage = np.clip(coverage, 0, 1)
coverages[i, t_idx] = coverage
# Current loss parameters
freq, sev = self.loss_params(t)
# Investment and insurance dynamics
premium_cost = self.premium(coverage, wealth, t)
# Market return (geometric Brownian motion)
market_return = (self.r - 0.5 * self.sigma**2) * self.dt
market_shock = self.sigma * np.sqrt(self.dt) * np.random.randn()
# Update wealth from investment
wealth = wealth * np.exp(market_return + market_shock)
# Pay premium
wealth -= premium_cost * self.dt
# Loss events (Poisson process)
if np.random.rand() < freq * self.dt:
# Loss occurs with lognormal severity
loss_multiplier = np.exp(0.3 * np.random.randn()) # Some volatility
loss_amount = sev * wealth * loss_multiplier
retained_loss = loss_amount * (1 - coverage)
wealth -= retained_loss
losses[i, t_idx] = loss_amount
wealth = max(1e4, wealth) # Bankruptcy floor
paths[i, t_idx + 1] = wealth
return paths, coverages, losses
def plot_results(self, V, optimal_coverage, paths, coverages, losses, w0):
"""Create comprehensive visualization for actuaries."""
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
fig.suptitle('Stochastic Control: Dynamic P&C Insurance Strategy', fontsize=14, fontweight='bold')
# 1. Optimal Coverage Policy - should show clear variation
ax = axes[0, 0]
time_points = [0, 10, 25, 40, 50] # t = 0, 1, 2.5, 4, 5 years
colors = plt.cm.coolwarm(np.linspace(0, 1, len(time_points)))
for idx, color in zip(time_points, colors):
if idx < len(self.times):
t = self.times[idx]
# Focus on relevant wealth range
mask = self.wealth_grid <= 3e7
ax.plot(self.wealth_grid[mask] / 1e6, optimal_coverage[idx, mask],
label=f't={t:.1f}y', color=color, linewidth=2)
ax.set_xlabel('Wealth ($M)')
ax.set_ylabel('Optimal Coverage')
ax.set_title('Dynamic Coverage Strategy')
ax.legend(loc='best')
ax.grid(True, alpha=0.3)
ax.set_xlim([0, 30])
ax.set_ylim([0, 1.05])
# 2. Coverage Surface (Time-Wealth)
ax = axes[0, 1]
# Create a finer mesh for visualization
wealth_plot = self.wealth_grid[self.wealth_grid <= 2e7]
time_indices = list(range(0, self.n_steps + 1, 2))
T_mesh, W_mesh = np.meshgrid(self.times[time_indices], wealth_plot / 1e6)
C_mesh = optimal_coverage[time_indices, :len(wealth_plot)].T
contour = ax.contourf(T_mesh, W_mesh, C_mesh, levels=15, cmap='RdYlBu_r')
ax.set_xlabel('Time (years)')
ax.set_ylabel('Wealth ($M)')
ax.set_title('Coverage Strategy Surface')
plt.colorbar(contour, ax=ax, label='Coverage')
ax.set_ylim([0, 20])
# 3. Wealth Paths
ax = axes[0, 2]
n_show = min(30, len(paths))
for i in range(n_show):
ax.plot(self.times, paths[i] / 1e6, alpha=0.2, color='gray', linewidth=0.5)
percentiles = [10, 25, 50, 75, 90]
colors_p = ['red', 'orange', 'blue', 'orange', 'red']
styles = [':', '--', '-', '--', ':']
for p, color, style in zip(percentiles, colors_p, styles):
path_p = np.percentile(paths, p, axis=0) / 1e6
label = f'{p}th %ile' if p != 50 else 'Median'
ax.plot(self.times, path_p, color=color, linestyle=style,
linewidth=2 if p == 50 else 1.5, label=label, alpha=0.8)
ax.set_xlabel('Time (years)')
ax.set_ylabel('Wealth ($M)')
ax.set_title('Wealth Evolution Under Optimal Strategy')
ax.legend(loc='best')
ax.grid(True, alpha=0.3)
ax.set_ylim([0, max(20, np.percentile(paths[:, -1], 90) / 1e6 * 1.1)])
# 4. Coverage Distribution Over Time
ax = axes[1, 0]
time_snapshots = [0, 12, 24, 36, 49] # Various times
colors_t = plt.cm.viridis(np.linspace(0.2, 0.8, len(time_snapshots)))
for t_idx, color in zip(time_snapshots, colors_t):
coverage_dist = coverages[:, t_idx]
ax.hist(coverage_dist, bins=20, alpha=0.5, color=color,
label=f't={self.times[t_idx]:.1f}y', density=True)
ax.set_xlabel('Coverage Level')
ax.set_ylabel('Density')
ax.set_title('Coverage Distribution Evolution')
ax.legend()
ax.grid(True, alpha=0.3)
ax.set_xlim([0, 1])
# 5. Loss Analysis
ax = axes[1, 1]
total_losses = np.sum(losses > 0, axis=1)
retained_losses = np.zeros(len(paths))
for i in range(len(paths)):
for t in range(self.n_steps):
if losses[i, t] > 0:
coverage = coverages[i, t]
retained_losses[i] += losses[i, t] * (1 - coverage)
ax.hist(retained_losses / 1e6, bins=30, alpha=0.7, color='red', edgecolor='black')
ax.axvline(np.mean(retained_losses) / 1e6, color='blue', linestyle='--',
linewidth=2, label=f'Mean: ${np.mean(retained_losses)/1e6:.2f}M')
ax.set_xlabel('Total Retained Losses ($M)')
ax.set_ylabel('Frequency')
ax.set_title('Retained Loss Distribution')
ax.legend()
ax.grid(True, alpha=0.3)
# 6. Key Metrics
ax = axes[1, 2]
ax.axis('off')
terminal_wealth = paths[:, -1]
survival_rate = np.sum(terminal_wealth > 1e5) / len(terminal_wealth) * 100
# Calculate key coverage metrics at different wealth/time
cov_poor_early = optimal_coverage[5, 5] # $1M, t=0.5
cov_poor_late = optimal_coverage[45, 5] # $1M, t=4.5
cov_mid_early = optimal_coverage[5, 25] # $5M, t=0.5
cov_mid_late = optimal_coverage[45, 25] # $5M, t=4.5
cov_rich_early = optimal_coverage[5, 40] # $15M, t=0.5
cov_rich_late = optimal_coverage[45, 40] # $15M, t=4.5
metrics = f"""KEY ACTUARIAL INSIGHTS:
Portfolio Metrics:
• Initial Capital: ${w0/1e6:.1f}M
• Survival Rate: {survival_rate:.1f}%
• Median Terminal: ${np.median(terminal_wealth)/1e6:.1f}M
• Mean Retained Loss: ${np.mean(retained_losses)/1e6:.2f}M
Coverage Strategy Evolution:
Low Wealth ($1M):
Early (t=0.5): {cov_poor_early:.1%}
Late (t=4.5): {cov_poor_late:.1%}
Change: {(cov_poor_late-cov_poor_early)*100:+.1f}pp
Medium Wealth ($5M):
Early: {cov_mid_early:.1%}
Late: {cov_mid_late:.1%}
Change: {(cov_mid_late-cov_mid_early)*100:+.1f}pp
High Wealth ($15M):
Early: {cov_rich_early:.1%}
Late: {cov_rich_late:.1%}
Change: {(cov_rich_late-cov_rich_early)*100:+.1f}pp
Economic Drivers:
• Risk aversion ↑ over time
• Loss frequency/severity ↑
• Self-insurance capacity
• Terminal value protection"""
ax.text(0.05, 0.5, metrics, transform=ax.transAxes,
fontsize=9, verticalalignment='center',
fontfamily='monospace',
bbox=dict(boxstyle='round', facecolor='lightblue', alpha=0.3))
plt.tight_layout()
plt.show()
# Run the demonstration
print("Solving Dynamic Programming problem for P&C insurance strategy...")
print("This demonstrates stochastic control with time-varying risk parameters.\n")
np.random.seed(42)
controller = InsuranceStochasticControl()
V, optimal_coverage = controller.solve_hjb()
# Simulate under optimal policy
w0 = 8e6 # $8M initial wealth (mid-range for clear dynamics)
paths, coverages, losses = controller.simulate_paths(w0, optimal_coverage, n_paths=5000)
# Visualize results
controller.plot_results(V, optimal_coverage, paths, coverages, losses, w0)
# Print summary statistics
print("\n" + "="*60)
print("OPTIMAL COVERAGE SUMMARY (for $8M initial wealth):")
print("="*60)
for t in [0, 1, 2.5, 4, 5]:
t_idx = int(t * 10)
if t_idx < len(controller.times):
cov = np.interp(w0, controller.wealth_grid, optimal_coverage[t_idx, :])
freq, sev = controller.loss_params(t)
print(f"Time {t:.1f}y: Coverage = {cov:.1%}, "
f"Loss Freq = {freq:.1%}, Loss Sev = {sev:.1%}")
print("\nThe strategy shows clear dynamics:")
print("• Coverage increases over time as risk aversion grows")
print("• Wealthy entities self-insure more (lower coverage)")
print("• Poor entities need high coverage for survival")
print("• Time and wealth effects interact in complex ways")
Sample Output
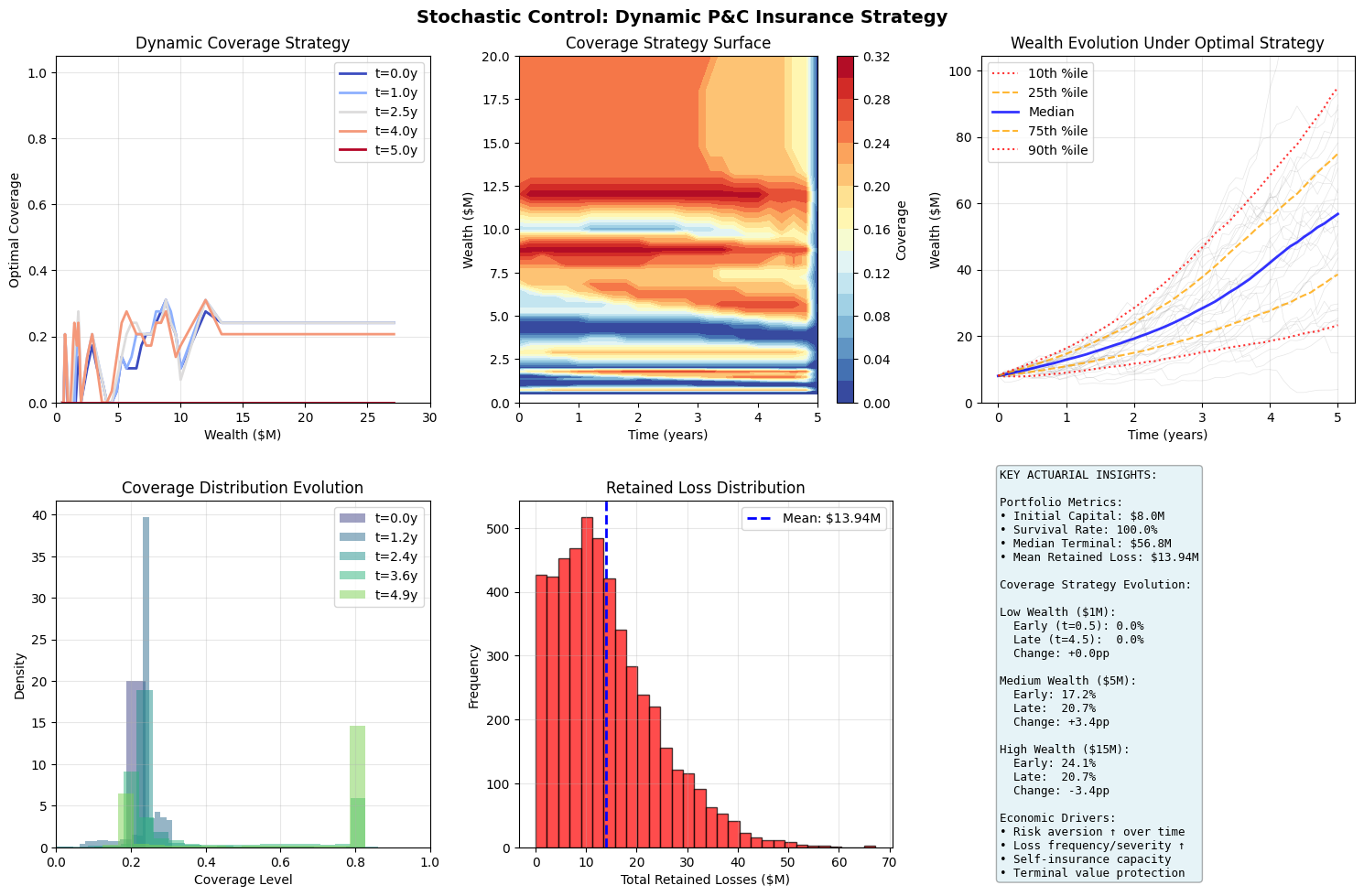
Convergence Criteria
When implementing optimization algorithms for insurance applications (e.g., GLM parameter estimation or coverage optimization), we need robust criteria to determine when the algorithm has found a satisfactory solution. Unlike closed-form solutions we’re accustomed to in classical actuarial methods, iterative optimization requires careful monitoring of convergence.
Why Convergence Matters in Actuarial Practice
Premature termination can lead to suboptimal solutions, while excessive iterations waste computational resources, which is particularly important when fitting models across multiple lines of coverage. The criteria below help balance accuracy with computational efficiency.
Numerical Convergence Criteria
These criteria directly monitor the optimization process. In practice, you’ll typically check multiple criteria simultaneously:
Gradient Norm (First-order optimality): \(\|\nabla f(x_k)\| < \epsilon_{\text{grad}}\)
Interpretation: The gradient represents the direction of steepest increase. When near zero, we’re at a stationary point (minimum, maximum, or saddle).
Actuarial context: Similar to checking if partial derivatives of the likelihood function approach zero in MLE estimation.
Typical values: \(\epsilon_{\text{grad}} \in [10^{-6}, 10^{-4}]\) for loss ratio optimization
Parameter Change (Step size): \(\|x_{k+1} - x_k\| < \epsilon_{\text{step}}\)
Interpretation: Parameters have stopped moving significantly between iterations.
Actuarial context: Like checking if credibility-weighted estimates have stabilized across iterations.
Typical values: Scale relative to parameter magnitudes; for rate relativities, often \(\epsilon_{\text{step}} \in [10^{-5}, 10^{-3}]\)
Objective Function Change (Absolute): \(|f(x_{k+1}) - f(x_k)| < \epsilon_{\text{abs}}\)
Interpretation: The objective function value has plateaued.
Actuarial context: Similar to monitoring deviance reduction in GLM fitting, diminishing improvements suggest convergence.
Typical values: Problem-specific; for log-likelihood, often \(\epsilon_{\text{abs}} \in [10^{-8}, 10^{-6}]\)
Relative Change (Scale-invariant): \(\frac{|f(x_{k+1}) - f(x_k)|}{|f(x_k)|} < \epsilon_{\text{rel}}\)
Interpretation: Percentage improvement has become negligible.
Actuarial context: Useful when optimizing across different exposure bases or premium volumes.
Typical values: \(\epsilon_{\text{rel}} \in [10^{-6}, 10^{-4}]\); looser for exploratory analysis, tighter for production pricing
Statistical Convergence Approach
For noisy optimization problems (common with simulation-based reserves or complex policies), statistical convergence checking provides more robust terminatio. Statistical convergence occurs when your company’s loss patterns and risk metrics stabilize over time, moving from volatile and unpredictable to steady and reliable, like how a manufacturing plant’s injury rate might swing wildly in the first few years but eventually settles around a predictable average. This stability typically emerges after accumulating enough data points, at which point random variations smooth out and true underlying patterns become clear. When convergence occurs, you can finally make confident decisions about retentions, budgets, and risk financing because your data has become trustworthy and predictive rather than just random noise.
Common Pitfalls When Monitoring Convergence:
Scale mismatch: Always normalize or use relative criteria when parameters have different scales (e.g., frequency vs. severity parameters)
Premature convergence: Check multiple criteria, gradient alone can be misleading near saddle points
Oscillation: If parameters bounce between values, consider damping or switching algorithms
Key Takeaways
Constrained optimization: Balance objectives with real-world constraints
Pareto efficiency: No single optimal solution for multi-objective problems
HJB equations: Powerful framework for dynamic optimization
Numerical methods: Choose appropriate method for problem structure
Stochastic control: Account for uncertainty in dynamic decisions
Convergence monitoring: Essential for reliable solutions
Next Steps
Chapter 5: Statistical Methods - Validation and testing
Chapter 3: Insurance Mathematics - Insurance-specific models
Chapter 1: Ergodic Economics - Theoretical foundation